آینده دوربینهای ترافیکی: هوش مصنوعی، تحلیل کلانداده و شهرهای هوشمند

مقدمه: از ابزار ثبت تخلف تا مغز بینایی شهر دوربینهای ترافیکی در ذهن بسیاری از مردم هنوز همان جعبههای فلزی کنار خیاباناند؛ ابزارهایی برای ثبت سرعت غیرمجاز، عبور از چراغ قرمز یا شناسایی پلاک خودروها….
مقدمه: از ابزار ثبت تخلف تا مغز بینایی شهر
دوربینهای ترافیکی در ذهن بسیاری از مردم هنوز همان جعبههای فلزی کنار خیاباناند؛ ابزارهایی برای ثبت سرعت غیرمجاز، عبور از چراغ قرمز یا شناسایی پلاک خودروها. اما این تصویر، دیگر برای توضیح نقش واقعی دوربینهای ترافیکی در آینده کافی نیست. جهان حملونقل شهری در حال ورود به مرحلهای تازه است؛ مرحلهای که در آن دوربینها فقط «تصویر» نمیگیرند، بلکه «تحلیل» میکنند، «پیشبینی» میکنند و حتی در تصمیمگیریهای لحظهای شهر مشارکت دارند.
در گذشته، دوربین ترافیکی بیشتر یک ابزار واکنشی بود. یعنی پس از وقوع تخلف یا حادثه، تصویر ثبت میشد و اپراتور انسانی یا سامانهای ساده آن را بررسی میکرد. اما شهرهای امروز با مسائلی روبهرو هستند که واکنش دیرهنگام برای آنها کافی نیست: تراکم شدید جمعیت، افزایش خودروها، آلودگی هوا، تصادفات مرگبار، کمبود ظرفیت معابر، رشد حملونقل هوشمند و ورود خودروهای متصل و خودران. برای چنین شهری، دوربین باید از یک شاهد خاموش به یک حسگر هوشمند تبدیل شود.
آینده دوربینهای ترافیکی بر سه ستون اصلی استوار است: هوش مصنوعی، تحلیل کلانداده و یکپارچگی با شهرهای هوشمند. هوش مصنوعی به دوربینها توانایی درک صحنه میدهد؛ کلانداده امکان استخراج الگو، پیشبینی و تصمیمسازی را فراهم میکند؛ و شهر هوشمند بستری است که در آن دادههای دوربین با چراغهای راهنمایی، سامانههای حملونقل عمومی، خودروهای متصل، حسگرهای آلودگی و مراکز کنترل شهری ترکیب میشود.
بر اساس گزارشهای بازار جهانی، از جمله گزارشهای منتشرشده در حوزه مدیریت ترافیک مبتنی بر هوش مصنوعی، ارزش این صنعت در سالهای آینده رشد چشمگیری خواهد داشت. دلیل این رشد روشن است: شهرها دیگر نمیتوانند ترافیک را فقط با ساخت جادههای بیشتر مدیریت کنند. راهحل آینده، هوشمندتر کردن زیرساخت موجود است. در این میان، دوربینهای ترافیکی به چشمهای اصلی شهر تبدیل میشوند؛ چشمهایی که اگر درست طراحی و قانونگذاری شوند، میتوانند شهری امنتر، روانتر، پاکتر و انسانیتر بسازند.
وضعیت فعلی دوربینهای ترافیکی و محدودیتهای آنها
برای درک آینده، ابتدا باید بدانیم نسل فعلی دوربینهای ترافیکی چه میکند و چه کمبودهایی دارد. دوربینهای رایج امروزی معمولاً در چند گروه قرار میگیرند: دوربینهای کنترل سرعت، دوربینهای ثبت عبور از چراغ قرمز، دوربینهای پلاکخوان یا ANPR، و دوربینهای نظارتی CCTV که تصاویر زنده را به مرکز کنترل ارسال میکنند.
دوربینهای کنترل سرعت معمولاً با رادار، لیزر یا حسگرهای نصبشده در سطح جاده کار میکنند. دوربینهای چراغ قرمز عبور غیرمجاز را ثبت میکنند. سامانههای پلاکخوان نیز از فناوری OCR یا نویسهخوان نوری برای شناسایی شماره پلاک استفاده میکنند. دوربینهای نظارتی هم اغلب تصویر را برای اپراتور انسانی ارسال میکنند تا وضعیت ترافیک را مشاهده کند.
مشکل اصلی این نسل از دوربینها، محدود بودن درک آنهاست. این سامانهها معمولاً فقط یک وظیفه مشخص دارند. مثلاً دوربین سرعت نمیتواند بهسادگی رفتار خطرناک عابر پیاده را تشخیص دهد. دوربین پلاکخوان الزاماً نمیتواند تراکم ترافیکی را تحلیل کند. دوربین CCTV نیز تا زمانی که اپراتور انسانی متوجه حادثه نشود، نقش فعالی در مدیریت بحران ندارد.
محدودیت دیگر، وابستگی به شرایط محیطی است. باران شدید، مه، تاریکی شب، نور شدید خورشید، سایه ساختمانها، پلاکهای مخدوش، ازدحام خودروها و زاویه نامناسب نصب میتوانند دقت دوربینها را کاهش دهند. در برخی پژوهشها نشان داده شده که دقت سامانههای پلاکخوان در شرایط بارندگی شدید میتواند افت قابل توجهی داشته باشد. این مسئله بهخصوص در شهرهایی که آبوهوای متغیر دارند، چالش جدی ایجاد میکند.
مسئله مهمتر، حجم عظیم دادههای استفادهنشده است. کلانشهرها روزانه حجم بسیار زیادی ویدئو از دوربینهای ترافیکی تولید میکنند، اما بخش بزرگی از این تصاویر هرگز بهصورت مؤثر تحلیل نمیشود. وقتی هزاران دوربین در شهر فعالاند، اتکا به نیروی انسانی برای مشاهده و تحلیل همه تصاویر عملاً غیرممکن است. اینجاست که هوش مصنوعی وارد میشود؛ نه برای جایگزینی کامل انسان، بلکه برای تبدیل حجم انبوه تصویر به اطلاعات قابل اقدام.

هوش مصنوعی چگونه دوربین ترافیکی را متحول میکند؟
هوش مصنوعی، بهویژه در شاخه بینایی رایانهای، مهمترین عامل تحول دوربینهای ترافیکی است. در سادهترین تعریف، بینایی رایانهای یعنی توانایی ماشین برای فهم تصویر و ویدئو. اما در کاربردهای ترافیکی، این فهم فقط به تشخیص وجود یک خودرو محدود نیست. سامانه باید بتواند نوع وسیله نقلیه، مسیر حرکت، سرعت تقریبی، فاصله با سایر خودروها، رفتار عابر، احتمال برخورد، توقف غیرعادی، عبور غیرمجاز، تغییر لاین خطرناک و حتی شکلگیری ازدحام را تشخیص دهد.
مدلهای یادگیری عمیق مانند خانواده YOLO، مدلهای مبتنی بر CNN، و معماریهای جدیدتر مبتنی بر Transformer تحول بزرگی در این حوزه ایجاد کردهاند. مدلهایی مانند YOLO به دلیل سرعت بالا، برای کاربردهای بلادرنگ بسیار مناسباند. این مدلها میتوانند در هر فریم ویدئو، چندین شیء را همزمان شناسایی کنند: خودرو، کامیون، موتورسیکلت، دوچرخهسوار، عابر پیاده، اتوبوس و حتی موانع جادهای.
اما تشخیص شیء فقط گام اول است. در مدیریت ترافیک، ردیابی اهمیت زیادی دارد. سامانه باید بفهمد یک خودرو در طول چند ثانیه یا چند دقیقه چگونه حرکت کرده است. الگوریتمهایی مانند DeepSORT، StrongSORT و نسلهای جدیدتر ردیابی، امکان حفظ هویت اشیاء در صحنههای شلوغ را فراهم میکنند. برای مثال، در یک چهارراه پرتردد، سامانه باید بتواند دهها خودرو را در لحظه دنبال کند، حتی اگر برخی از آنها پشت اتوبوس یا کامیون پنهان شوند.
لایه بعدی، تحلیل رفتار است. دوربین هوشمند آینده فقط نمیگوید «یک خودرو در تصویر وجود دارد»، بلکه میتواند بگوید «این خودرو با الگوی غیرعادی حرکت میکند»، «این عابر در نقطه خطر قرار گرفته»، «احتمال برخورد در چند ثانیه آینده بالاست» یا «یک خودرو در لاین اضطراری توقف کرده است». چنین تحلیلی از نظر فلسفه مدیریت شهری بسیار مهم است، چون دوربین را از ابزار مجازات پس از وقوع تخلف به ابزار پیشگیری قبل از حادثه تبدیل میکند.
برای نمونه، اگر سامانهای تشخیص دهد که خودرویی خلاف جهت در بزرگراه حرکت میکند، میتواند در کسری از ثانیه هشدار را به مرکز کنترل، تابلوهای پیام متغیر و حتی خودروهای متصل ارسال کند. اگر دوربینها تشخیص دهند که در یک تقاطع، عابران زیادی در حال عبورند، چراغ راهنمایی میتواند زمان عبور عابر را افزایش دهد. اگر سامانه متوجه الگوی ترمز ناگهانی در چند خودرو شود، میتواند احتمال حادثه یا مانع در مسیر را گزارش کند.
پردازش لبهای؛ چرا همهچیز نباید به ابر ارسال شود؟
یکی از پرسشهای کلیدی در آینده دوربینهای ترافیکی این است که دادهها کجا پردازش شوند: روی خود دوربین، در مرکز محلی، یا در ابر؟ ارسال ویدئوی خام هزاران دوربین به دیتاسنتر مرکزی نیازمند پهنای باند عظیم است. از سوی دیگر، بسیاری از تصمیمهای ترافیکی باید در لحظه گرفته شوند. اگر سامانه برای تشخیص یک حادثه چند ثانیه یا چند دقیقه تأخیر داشته باشد، ارزش عملیاتی آن کاهش مییابد.
اینجاست که مفهوم Edge AI یا هوش مصنوعی لبهای اهمیت پیدا میکند. در این معماری، بخشی از پردازش مستقیماً روی خود دوربین یا روی دستگاهی نزدیک به محل نصب دوربین انجام میشود. تراشههایی مانند NVIDIA Jetson، Ambarella، Qualcomm و Hailo امکان اجرای مدلهای بینایی رایانهای را روی دستگاههای کممصرف فراهم کردهاند. نتیجه این است که دوربین میتواند خودش اشیاء را تشخیص دهد، رویدادهای مهم را استخراج کند و فقط فراداده یا هشدارها را به مرکز ارسال کند.
این معماری چند مزیت مهم دارد. نخست، مصرف پهنای باند کاهش مییابد، چون به جای ارسال ویدئوی کامل، اطلاعاتی مانند نوع شیء، سرعت، موقعیت، زمان و نوع رویداد ارسال میشود. دوم، تأخیر کاهش پیدا میکند، زیرا تصمیم اولیه نزدیک به محل حادثه گرفته میشود. سوم، حریم خصوصی بهتر قابل مدیریت است، چون میتوان تصویر خام را در محل نگه داشت یا حتی اصلاً ذخیره نکرد و فقط دادههای ناشناسشده را منتقل کرد.
البته پردازش لبهای به معنای حذف ابر نیست. معماری آینده معمولاً ترکیبی است: لبه برای تصمیمهای فوری، لایه میانی یا Fog برای هماهنگی منطقهای، و ابر برای تحلیلهای سنگین، آموزش مدلها، گزارشگیری و برنامهریزی بلندمدت. این ترکیب، ستون فقرات سامانههای ترافیکی هوشمند در شهرهای آینده خواهد بود.

کلانداده؛ مغز متفکر پشت چشمهای شهر
اگر دوربینها چشم شهر باشند، کلانداده مغز تحلیلی آن است. هر دوربین بهتنهایی میتواند اطلاعات ارزشمندی تولید کند، اما ارزش واقعی زمانی ظاهر میشود که دادههای هزاران دوربین با منابع دیگر ترکیب شود: GPS ناوگان حملونقل عمومی، دادههای اپلیکیشنهای مسیریابی، حسگرهای کیفیت هوا، رادارها، حلقههای القایی، دادههای پارکینگ، دادههای هواشناسی و حتی اطلاعات خودروهای متصل.
چرا این ترکیب مهم است؟ چون ترافیک یک پدیده چندعلتی است. ازدحام در یک خیابان ممکن است فقط نتیجه تعداد زیاد خودروها نباشد؛ ممکن است به دلیل بارندگی، خرابی چراغ راهنمایی، تصادف کوچک، پارک دوبله، رویداد ورزشی، تغییر مسیر اتوبوس یا حتی آلودگی هوا و محدودیت تردد باشد. برای فهم چنین پدیدهای، شهر به دادههای متنوع نیاز دارد.
پلتفرمهای کلانداده مانند Apache Kafka، Spark، Flink، Hadoop و دریاچههای داده شهری امکان جمعآوری، ذخیرهسازی و تحلیل این دادهها را فراهم میکنند. در یک معماری پیشرفته، دادهها بهصورت بلادرنگ وارد سامانه میشوند، پاکسازی و استانداردسازی میشوند، سپس مدلهای تحلیلی روی آنها اجرا میشود. خروجی میتواند پیشبینی ترافیک، شناسایی نقاط حادثهخیز، تشخیص تخلف، پیشنهاد تغییر زمانبندی چراغها یا هشدار به رانندگان باشد.
تحلیل پیشبینانه یکی از جذابترین کاربردهای کلانداده در مدیریت ترافیک است. با بررسی دادههای گذشته و وضعیت لحظهای، سامانه میتواند تخمین بزند که در ۱۵، ۳۰ یا ۶۰ دقیقه آینده کدام مسیرها شلوغ میشوند. این پیشبینی فقط برای رانندگان مفید نیست؛ برای مدیریت شهری هم حیاتی است. اگر شهرداری بداند در یک محدوده خاص تا نیم ساعت آینده گره ترافیکی شکل میگیرد، میتواند مسیر اتوبوسها را تغییر دهد، چراغها را تنظیم کند، پیام هشدار منتشر کند یا نیروهای امدادی را آماده کند.
چراغهای راهنمایی تطبیقی و مدیریت هوشمند جریان ترافیک
یکی از مهمترین نتایج ترکیب دوربین هوشمند و کلانداده، کنترل تطبیقی چراغهای راهنمایی است. در بسیاری از شهرها، زمانبندی چراغها هنوز ثابت یا نیمهثابت است. یعنی چراغ در ساعات مختلف طبق برنامهای از پیش تعیینشده عمل میکند. این روش در شرایط عادی قابل قبول است، اما در برابر وضعیتهای پویا مثل بارندگی، تصادف، رویدادهای شهری یا تغییر ناگهانی حجم ترافیک، انعطاف کافی ندارد.
در سامانههای تطبیقی، دوربینها و حسگرها وضعیت واقعی تقاطع را میسنجند. سپس الگوریتم تصمیم میگیرد کدام مسیر باید زمان سبز بیشتری بگیرد، کدام فاز باید کوتاهتر شود، و چگونه میتوان تأخیر کلی را کاهش داد. نسلهای قدیمیتر این سامانهها مانند SCOOT و SCATS سالهاست استفاده میشوند، اما نسل جدید با یادگیری تقویتی عمیق وارد مرحله تازهای شده است.
یادگیری تقویتی به زبان ساده یعنی الگوریتم از تجربه یاد میگیرد که کدام تصمیم نتیجه بهتری دارد. در مدیریت ترافیک، عامل هوشمند میتواند در محیط شبیهسازیشده آموزش ببیند و بیاموزد چگونه زمانبندی چراغها را طوری تنظیم کند که تأخیر، توقفهای بیمورد، مصرف سوخت و احتمال تصادف کاهش یابد. وقتی این عامل با دادههای دوربینهای واقعی تغذیه شود، سامانه میتواند در لحظه به شرایط خیابان واکنش نشان دهد.
اهمیت این فناوری فقط در کاهش زمان سفر نیست. هر توقف غیرضروری خودرو یعنی مصرف سوخت بیشتر، تولید آلاینده بیشتر و افزایش فرسودگی روانی شهروندان. بنابراین، یک چراغ هوشمند خوب میتواند همزمان بر اقتصاد، محیط زیست، ایمنی و کیفیت زندگی اثر بگذارد.

تشخیص و واکنش خودکار به حوادث
در مدیریت حوادث ترافیکی، زمان حیاتیترین عامل است. هر دقیقه تأخیر در تشخیص تصادف میتواند باعث افزایش ترافیک، کاهش شانس نجات مصدومان و افزایش احتمال تصادفات ثانویه شود. دوربینهای هوشمند آینده میتوانند این زمان را به شکل چشمگیری کاهش دهند.
سامانههای هوشمند میتوانند توقف غیرعادی خودرو، کاهش ناگهانی سرعت در یک لاین، حرکت خلاف جهت، دود، آتش، افتادن بار از کامیون، حضور عابر در بزرگراه یا تجمع غیرعادی خودروها را تشخیص دهند. سپس هشدار به مرکز کنترل ارسال میشود و واکنشهای بعدی میتواند بهصورت نیمهخودکار یا خودکار فعال شود: تغییر پیام تابلوهای دیجیتال، ارسال هشدار به اپلیکیشنهای مسیریابی، بازتنظیم چراغها برای ایجاد مسیر امداد، اطلاع به پلیس راهور یا اورژانس، و هدایت رانندگان به مسیر جایگزین.
نکته مهم این است که تشخیص حادثه فقط با تصویر انجام نمیشود. بهترین سامانهها دادههای دوربین را با دادههای سرعت، GPS، تماسهای اضطراری، اطلاعات هواشناسی و گزارشهای مردمی ترکیب میکنند. برای مثال، اگر دوربین توقف خودرو را ثبت کند، رادار کاهش سرعت را نشان دهد و چند خودرو از همان نقطه ترمز ناگهانی گزارش کنند، احتمال حادثه بالا میرود و سامانه با اطمینان بیشتری هشدار میدهد.
شهر هوشمند؛ جایی که دوربینها تنها نیستند
دوربین هوشمند زمانی بیشترین ارزش را دارد که بخشی از یک اکوسیستم شهری باشد. شهر هوشمند مجموعهای از سامانههای متصل است که برای بهبود کیفیت زندگی، افزایش کارایی خدمات و کاهش مصرف منابع کار میکنند. در چنین شهری، دوربین ترافیکی با چراغها، اتوبوسها، مترو، پارکینگها، خودروهای متصل، تابلوهای دیجیتال، حسگرهای آلودگی و مراکز فرماندهی یکپارچه در ارتباط است.
برای مثال، اگر دوربینها تشخیص دهند که یک اتوبوس در مسیر خود تأخیر دارد، سامانه میتواند در تقاطعهای بعدی اولویت عبور به آن بدهد. اگر حسگرهای آلودگی نشان دهند که سطح آلایندهها در یک محدوده بالا رفته، دادههای دوربین میتواند منبع تراکم را مشخص کند و مدیریت شهری محدودیتهای موقت یا تغییر مسیر را اعمال کند. اگر خودروهای متصل در یک مسیر لغزندگی جاده را گزارش کنند، دوربینهای حرارتی و سامانههای بینایی میتوانند وضعیت را تأیید کنند و هشدار بلادرنگ منتشر شود.
یکی دیگر از مفاهیم مهم در شهرهای هوشمند، دوقلوی دیجیتال است. دوقلوی دیجیتال نسخه مجازی شهر است؛ مدلی سهبعدی و دادهمحور که وضعیت خیابانها، ساختمانها، جمعیت، انرژی و حملونقل را شبیهسازی میکند. وقتی دادههای دوربینهای ترافیکی به دوقلوی دیجیتال متصل شود، مدیران شهری میتوانند اثر تصمیمها را پیش از اجرای واقعی بررسی کنند. مثلاً اگر یک خیابان بسته شود، سامانه میتواند پیشبینی کند ترافیک به کدام مسیرها منتقل میشود و چه اثری بر آلودگی یا زمان سفر خواهد داشت.

ارتباط V2X و خودروهای متصل
آینده دوربینهای ترافیکی به خودروهای متصل گره خورده است. فناوری V2X یا Vehicle-to-Everything یعنی ارتباط خودرو با همهچیز: خودرو با خودرو، خودرو با زیرساخت، خودرو با عابر، خودرو با شبکه و خودرو با مرکز کنترل. در این آینده، دوربین کنار جاده فقط به مرکز کنترل گزارش نمیدهد، بلکه میتواند اطلاعات حیاتی را مستقیماً به خودروها ارسال کند.
فرض کنید رانندهای به تقاطعی نزدیک میشود، اما به دلیل وجود یک کامیون بزرگ، عابر پیاده در نقطه کور او قرار دارد. دوربین زیرساخت میتواند عابر را تشخیص دهد و هشدار را از طریق واحد کنار جادهای به خودرو ارسال کند. یا در بزرگراه، دوربین تشخیص میدهد که در چندصد متر جلوتر حادثهای رخ داده است؛ خودروهای متصل میتوانند پیش از رسیدن به محل، هشدار دریافت کنند و سرعت را کاهش دهند.
این ارتباط برای خودروهای خودران حتی مهمتر است. خودروهای خودران با وجود حسگرهای پیشرفته، محدودیت دید دارند. دوربینهای زیرساخت میتوانند نگاه از بالا یا دید فراتر از خط دید خودرو را فراهم کنند. به این ترتیب، خودرو و شهر با هم یک شبکه ادراکی مشترک میسازند. این مفهوم میتواند ایمنی خودروهای خودران را به شکل قابل توجهی افزایش دهد.
اثرات زیستمحیطی دوربینهای هوشمند
یکی از دلایل بنیادین برای توسعه دوربینهای ترافیکی هوشمند، کاهش اثرات زیستمحیطی حملونقل است. ترافیک سنگین فقط زمان شهروندان را تلف نمیکند؛ مصرف سوخت را افزایش میدهد، آلودگی هوا را تشدید میکند و انتشار گازهای گلخانهای را بالا میبرد.
وقتی دوربینها به بهینهسازی جریان ترافیک کمک میکنند، تعداد توقفها و حرکتهای مجدد کاهش مییابد. همین تغییر ساده میتواند مصرف سوخت را کاهش دهد، بهخصوص در مسیرهای پرتردد شهری. اولویتدهی به حملونقل عمومی، مدیریت خطوط پرسرنشین، کاهش پارک دوبله، تشخیص سریع حادثه و هدایت هوشمند مسیرها همگی اثر مستقیم بر کاهش آلودگی دارند.
در آینده، برخی دوربینها و حسگرهای کنار جاده میتوانند آلایندگی خودروها را نیز پایش کنند. فناوریهایی مانند دوربینهای طیفی یا حسگرهای از راه دور میتوانند میزان برخی آلایندههای خروجی خودرو را در حال حرکت تخمین بزنند. اگر این دادهها با قوانین شفاف و حفاظت قوی از حریم خصوصی همراه شوند، میتوانند در سیاستگذاری محیط زیستی نقش مهمی داشته باشند.

حریم خصوصی؛ حساسترین نقطه آینده دوربینهای ترافیکی
هرچه دوربینها هوشمندتر میشوند، نگرانی درباره حریم خصوصی نیز جدیتر میشود. این نگرانی طبیعی و منطقی است. دوربینی که فقط سرعت خودرو را ثبت میکند، با دوربینی که میتواند پلاک، چهره، مسیر حرکت، رفتار راننده و الگوی تردد را تحلیل کند، از نظر حقوقی و اخلاقی تفاوت بزرگی دارد.
مسئله اصلی این است که داده ترافیکی در بسیاری موارد میتواند به داده شخصی تبدیل شود. پلاک خودرو، تصویر چهره، مسیرهای روزانه و زمان رفتوآمد میتوانند الگوی زندگی افراد را آشکار کنند. بنابراین، توسعه دوربینهای هوشمند بدون چارچوب حقوقی و اخلاقی روشن، میتواند به بیاعتمادی عمومی منجر شود.
در مقرراتی مانند GDPR اروپا، اصولی مانند کمینهسازی داده، شفافیت، هدفمندی پردازش، محدودیت زمان نگهداری و حق اعتراض یا دسترسی به داده اهمیت زیادی دارد. قانونگذاریهای جدیدتر مانند AI Act اروپا نیز سامانههای هوش مصنوعی در حوزههای حساس را به سمت ارزیابی ریسک، مستندسازی، نظارت انسانی و پاسخگویی سوق میدهند.
از نظر فنی، راهکارهایی برای کاهش ریسک وجود دارد. یکی از آنها پردازش در لبه است؛ یعنی تصویر خام در همان محل تحلیل شود و فقط خروجی ضروری ارسال گردد. روش دیگر، ناشناسسازی و ماتکردن خودکار چهرهها و پلاکهایی است که برای هدف سامانه ضروری نیستند. یادگیری فدرال نیز میتواند امکان آموزش مدلها را بدون انتقال داده خام فراهم کند. حریم خصوصی افتراقی هم با افزودن نویز کنترلشده به دادههای آماری، مانع شناسایی افراد از روی الگوهای کلی میشود.
اصل مهم این است: هوشمندسازی ترافیک نباید به معنای نظارت بیحدومرز باشد. اگر شهروندان احساس کنند سامانهها عادلانه، شفاف و محدود به هدف مشخصاند، پذیرش عمومی افزایش مییابد. اما اگر دوربینها به ابزار مبهم و غیرپاسخگو تبدیل شوند، حتی بهترین فناوری هم با مقاومت اجتماعی روبهرو خواهد شد.
سوگیری الگوریتمی و عدالت در اجرای قانون
هوش مصنوعی بیطرف به دنیا نمیآید. مدلها از دادههایی یاد میگیرند که انسانها جمعآوری کردهاند، و این دادهها ممکن است سوگیری داشته باشند. اگر دادههای آموزشی بیشتر از مناطق خاص، شرایط نوری خاص، مدلهای خاص خودرو یا رفتارهای خاص جمعآوری شده باشد، سامانه ممکن است در شرایط دیگر خطا کند.
برای مثال، یک مدل تشخیص تخلف ممکن است در شناسایی پلاکهای قدیمی، خودروهای فرسوده، موتورسیکلتها یا عابران در شرایط کمنور عملکرد ضعیفتری داشته باشد. اگر این خطاها به جریمه یا تصمیمهای اجرایی منجر شوند، مسئله فقط فنی نیست؛ مسئله عدالت است.
برای کاهش این خطر، سامانههای ترافیکی هوشمند باید بهطور منظم ممیزی شوند. ممیزی الگوریتمی یعنی بررسی مستقل عملکرد مدل در گروهها، مناطق و شرایط مختلف. همچنین دادههای آموزشی باید متنوع، بهروز و نماینده واقعیت شهری باشند. در موارد حساس، تصمیم نهایی نباید کاملاً خودکار باشد و نظارت انسانی باید وجود داشته باشد.
مطالعات جهانی؛ مسیرهای متفاوت شهرها
شهرهای مختلف جهان رویکردهای متفاوتی نسبت به دوربینهای هوشمند دارند. در برخی شهرهای آسیایی، سامانههای بسیار گسترده و متمرکز برای مدیریت ترافیک و نظارت شهری استفاده میشود. نمونههایی مانند هانگژو و پروژه City Brain نشان دادهاند که یکپارچهسازی دادههای دوربین، چراغها و حملونقل عمومی میتواند زمان سفر را کاهش دهد و مدیریت تقاطعها را بهبود دهد.
در اروپا، تمرکز بیشتری بر تعادل میان کارآمدی و حریم خصوصی دیده میشود. شهرهایی مانند لندن، برلین، آمستردام و بارسلون تلاش میکنند از دوربینهای هوشمند برای کنترل آلودگی، مدیریت ترافیک و تحلیل جریان شهری استفاده کنند، اما همزمان محدودیتهایی برای نگهداری داده، شناسایی چهره و استفاده ثانویه از اطلاعات اعمال میشود.
در آمریکای شمالی، وضعیت پراکندهتر است. برخی شهرها پایلوتهای پیشرفته در زمینه چراغهای تطبیقی، V2X و تحلیل ویدئویی اجرا کردهاند، اما نبود چارچوب یکپارچه و حساسیتهای حقوقی باعث شده سرعت پذیرش در مناطق مختلف متفاوت باشد. در خاورمیانه نیز شهرهایی مانند دوبی و پروژههای شهری نسل نو، بهدنبال استفاده گسترده از دوربینهای مبتنی بر هوش مصنوعی در مدیریت ترافیک و ایمنی شهری هستند.
این تفاوتها نشان میدهد آینده دوربینهای ترافیکی فقط به فناوری وابسته نیست. فرهنگ حقوقی، اعتماد عمومی، ظرفیت زیرساختی، مدل حکمرانی داده و اولویتهای شهری هم تعیین میکنند که یک شهر چگونه از این فناوری استفاده خواهد کرد.
سختافزار آینده؛ فراتر از دوربین معمولی
دوربینهای آینده فقط دوربین نوری ساده نیستند. نسل جدید زیرساخت ترافیکی از ترکیب حسگرهای مختلف استفاده خواهد کرد: دوربینهای 4K و 8K با دامنه دینامیکی بالا، دوربینهای حرارتی برای شب و مه، رادارهای مایکروویو برای اندازهگیری سرعت و فاصله، لایدار برای مدل سهبعدی محیط و حتی حسگرهای صوتی برای تشخیص تصادف یا ترمز شدید.
چرا این تنوع مهم است؟ چون هیچ حسگری کامل نیست. دوربین نوری در نور مناسب تصویر غنی میدهد، اما در مه و تاریکی ضعف دارد. رادار در شرایط بد آبوهوایی مقاومتر است، اما جزئیات بصری کمتری ارائه میدهد. لایدار اطلاعات سهبعدی دقیق میدهد، اما هزینه بالاتری دارد. ترکیب این حسگرها یا Sensor Fusion باعث میشود سامانه نسبت به خطا مقاومتر شود.
در تقاطعهای حساس، استفاده از لایدار کنار جاده میتواند موقعیت سهبعدی خودروها و عابران را با دقت بالا مشخص کند. دوربین حرارتی میتواند عابر را در تاریکی تشخیص دهد. رادار میتواند سرعت خودرو را حتی در باران اندازه بگیرد. وقتی این دادهها با هوش مصنوعی ترکیب شوند، سامانه دیدی بسیار کاملتر از هر حسگر منفرد خواهد داشت.
امنیت سایبری؛ نقطهای که نباید دستکم گرفته شود
هر سامانه متصل، در معرض تهدید سایبری است. دوربینهای ترافیکی هوشمند نیز از این قاعده مستثنا نیستند. اگر مهاجمان بتوانند به شبکه دوربینها نفوذ کنند، پیامهای جعلی ارسال کنند، مدلهای هوش مصنوعی را فریب دهند یا دسترسی به مرکز کنترل را مختل کنند، پیامد آن میتواند بسیار جدی باشد.
تهدیدها فقط شامل هک سنتی نیستند. در حوزه هوش مصنوعی، حملات خصمانه نیز مطرحاند؛ یعنی ایجاد الگوهایی که برای انسان بیمعنیاند اما مدل را دچار خطا میکنند. برای مثال، تغییرات خاص در تابلو، نور یا سطح خودرو ممکن است باعث شود مدل شیء را اشتباه تشخیص دهد. بنابراین، امنیت آینده دوربینهای ترافیکی باید هم امنیت شبکه و هم امنیت مدلهای هوش مصنوعی را پوشش دهد.
راهکارها شامل رمزنگاری ارتباطات، بهروزرسانی امن نرمافزار، احراز هویت دستگاهها، جداسازی شبکههای حیاتی، پایش نفوذ، ممیزی دورهای، آموزش مدلهای مقاوم و وجود برنامه بازیابی بحران است. در شهر هوشمند، امنیت سایبری دیگر مسئله واحد فناوری اطلاعات نیست؛ بخشی از ایمنی عمومی شهر است.

اقتصاد دوربینهای هوشمند؛ هزینه یا سرمایهگذاری؟
نصب و نگهداری دوربینهای هوشمند هزینهبر است. دوربینهای پیشرفته، پردازندههای لبهای، ارتباطات پرسرعت، مراکز داده، نرمافزارهای تحلیل، تیمهای نگهداری و چارچوبهای امنیتی همگی نیازمند سرمایهگذاریاند. اما اگر درست اجرا شوند، بازگشت سرمایه قابل توجهی دارند.
کاهش تصادفات، کاهش زمان سفر، صرفهجویی در سوخت، کاهش آلودگی، افزایش بهرهوری حملونقل عمومی، کاهش هزینه عملیات انسانی، بهبود مدیریت بحران و کاهش خسارتهای ناشی از ازدحام همگی منافع اقتصادی مستقیم و غیرمستقیم ایجاد میکنند. با این حال، شهرها باید مراقب باشند که دوربینها صرفاً به ابزار درآمدزایی از جریمه تبدیل نشوند. اگر شهروندان احساس کنند هدف اصلی جریمه گرفتن است، اعتماد عمومی کاهش مییابد.
مدل سالم اقتصادی باید بر ایمنی، روانسازی ترافیک، کاهش هزینه اجتماعی تصادفات و بهبود کیفیت زندگی متمرکز باشد. درآمد ناشی از جریمه، اگر وجود دارد، باید شفاف و ترجیحاً در بهبود ایمنی و حملونقل عمومی سرمایهگذاری شود.
دهه ۲۰۳۰؛ دوربینها در کنار خودروهای خودران، 6G و هوش ازدحامی
در دهه ۲۰۳۰، دوربینهای ترافیکی احتمالاً به شبکهای بسیار پیشرفتهتر تبدیل خواهند شد. خودروهای خودران، شبکههای 6G، دوقلوهای دیجیتال، پهپادهای ترافیکی و مدلهای هوش مصنوعی مولد، شکل تازهای از مدیریت شهری را ممکن میکنند.
شبکههای 6G با تأخیر بسیار پایین و ظرفیت بالا، میتوانند ارتباط بلادرنگ میان هزاران حسگر شهری را فراهم کنند. خودروهای خودران دادههای دید خود را با زیرساخت به اشتراک میگذارند و از دادههای دوربینهای شهری برای تصمیمگیری بهتر استفاده میکنند. دوقلوهای دیجیتال میتوانند سناریوهای پیچیده را شبیهسازی کنند و پیش از وقوع بحران، بهترین پاسخ را پیشنهاد دهند.
در آینده حتی ممکن است مفهوم «هوش ازدحامی» در مدیریت ترافیک پررنگ شود؛ یعنی بهجای تکیه کامل بر یک مرکز فرماندهی، هر دوربین یا تقاطع بتواند با همسایگان خود ارتباط بگیرد و تصمیمهای محلی هماهنگ بگیرد. چنین معماری توزیعشدهای میتواند تابآوری شهر را افزایش دهد، زیرا با اختلال در یک نقطه، کل سامانه از کار نمیافتد.
چالشهای پیش رو
با وجود همه فرصتها، آینده دوربینهای ترافیکی بدون چالش نیست. نخستین چالش، زیرساخت است. بسیاری از شهرها هنوز شبکه ارتباطی، برق پایدار، تجهیزات مدرن و مرکز داده مناسب برای پیادهسازی سامانههای هوشمند ندارند. چالش دوم، هزینه است. تجهیز هر تقاطع به دوربینهای پیشرفته، پردازش لبهای، رادار یا لایدار میتواند سرمایهگذاری سنگینی بخواهد.
چالش سوم، قانونگذاری است. فناوری با سرعت زیادی رشد میکند، اما قوانین معمولاً کندتر حرکت میکنند. اگر چارچوب حقوقی روشن نباشد، هم شهروندان آسیب میبینند و هم مدیران شهری در اجرای پروژهها دچار ابهام میشوند. چالش چهارم، اعتماد عمومی است. بدون اعتماد، حتی دقیقترین سامانهها هم از نظر اجتماعی موفق نخواهند بود.
چالش پنجم، کیفیت داده و نگهداری مدلهاست. مدل هوش مصنوعی یکبار آموزش داده نمیشود که برای همیشه کامل بماند. شهر تغییر میکند، خیابانها بازطراحی میشوند، خودروهای جدید وارد میشوند، الگوهای رفتوآمد عوض میشوند و شرایط اقلیمی متفاوت میشود. بنابراین، مدلها باید پایش، بازآموزی و ممیزی شوند.
نتیجهگیری: دوربینهای آینده باید هوشمند، پاسخگو و انسانمحور باشند
آینده دوربینهای ترافیکی، فقط آینده یک فناوری نیست؛ آینده شیوه مدیریت حرکت در شهرهاست. این دوربینها از ابزارهای ساده ثبت تخلف به گرههای هوشمند یک شبکه شهری تبدیل میشوند. آنها میتوانند تصادف را زودتر تشخیص دهند، ترافیک را پیشبینی کنند، چراغها را تطبیق دهند، حملونقل عمومی را اولویت دهند، آلودگی را کاهش دهند و با خودروهای متصل ارتباط برقرار کنند.
اما مسیر درست این تحول، صرفاً نصب دوربینهای بیشتر نیست. شهر آینده به دوربینهای بهتر، قوانین شفافتر، دادههای امنتر، الگوریتمهای عادلانهتر و حکمرانی پاسخگوتر نیاز دارد. فناوری زمانی ارزشمند است که در خدمت انسان باشد. اگر دوربینهای ترافیکی فقط ابزار کنترل باشند، شهروندان از آنها فاصله میگیرند. اما اگر به کاهش تصادف، کوتاهتر شدن سفر، هوای پاکتر و خیابانهای امنتر کمک کنند، میتوانند به بخشی پذیرفتهشده و مفید از زندگی شهری تبدیل شوند.
در نهایت، پرسش اصلی این نیست که آیا دوربینهای ترافیکی هوشمند خواهند شد یا نه؛ این روند از همین حالا آغاز شده است. پرسش اصلی این است که این هوشمندی با چه اصولی هدایت میشود. آینده مطلوب، آیندهای است که در آن دوربینها چشمهای سرد نظارت نباشند، بلکه حسگرهای مسئول، محدود، شفاف و انسانمحور شهری باشند که بهتر میبیند، بهتر میفهمد و بهتر از شهروندان خود مراقبت میکند.
شهر شما آمادهی نسل جدید مدیریت ترافیک است؟
طراحی سامانه دوربین ترافیکی هوشمند فقط نصب سختافزار نیست؛ شما در حال ساخت یک زیرساخت دادهمحور شهری هستید که باید هوش مصنوعی، پردازش لبهای، کلانداده، امنیت سایبری و یکپارچگی با سامانههای شهری را پوشش دهد.
از تشخیص بلادرنگ حادثه تا چراغهای تطبیقی مبتنی بر یادگیری تقویتی، از تحلیل پیشبینانه ترافیک تا پایش زیستمحیطی و امنیت شبکه — معماری درست، تفاوت بین یک پروژه نمایشی و یک زیرساخت پایدار شهری است.
تعداد تقاطعها، سطح هوشمندسازی موردنظر، الزامات امنیتی، نیاز به Edge/Cloud، یکپارچگی با پلیس یا مرکز کنترل را مشخص کنید تا پیشنهاد معماری فنی + نقشه راه اجرایی مرحلهای دریافت کنید.
در شهرهای هوشمند، زیرساختها به کمک هوش مصنوعی، اینترنت اشیا و تحلیل کلانداده به هم متصل میشوند و بهصورت بلادرنگ تصمیمسازی میکنند. در مقابل، شهرهای سنتی عمدتاً بر مدیریت انسانی و واکنش پس از وقوع مشکل متکی هستند. تفاوت بنیادین در «پیشبینی و بهینهسازی» است نه صرفاً «واکنش».
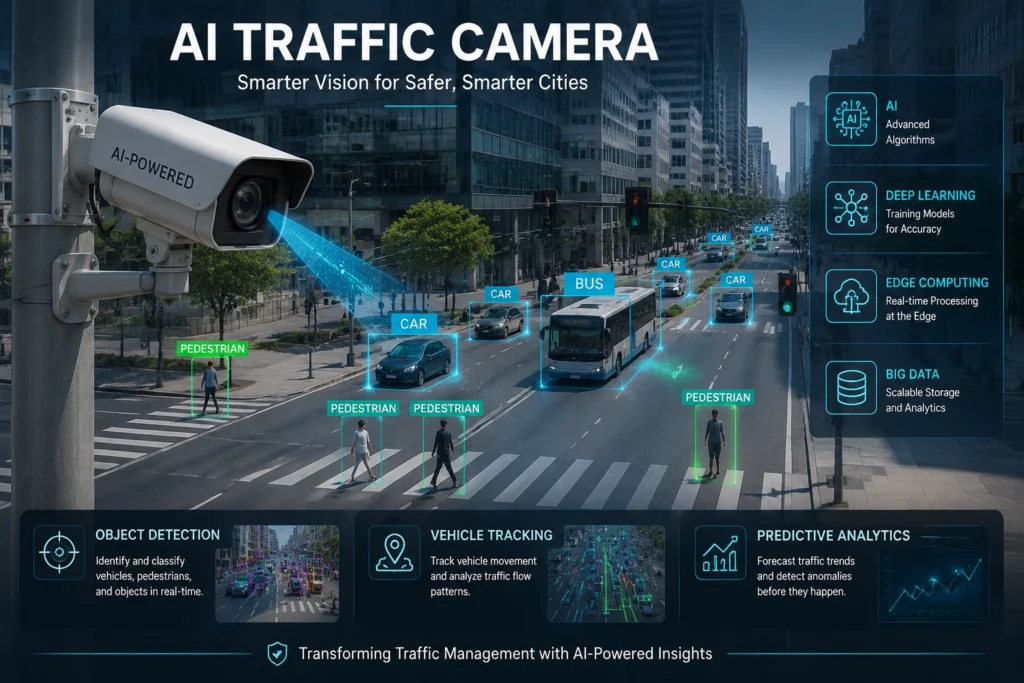
در شهرهای هوشمند، دوربینهای ترافیکی فقط ابزار ثبت تخلف نیستند؛ آنها حسگرهای بینایی شهر هستند. این دوربینها با استفاده از هوش مصنوعی میتوانند تراکم ترافیک را تحلیل کنند، تصادف را پیشبینی کنند، رفتارهای خطرناک را تشخیص دهند و به سامانههای کنترلی مانند چراغهای راهنمایی داده بدهند.
هوش مصنوعی با استفاده از الگوریتمهای بینایی رایانهای و یادگیری عمیق، امکان تشخیص اشیاء، تحلیل رفتار، ردیابی خودروها و پیشبینی ازدحام را فراهم میکند. این یعنی در شهرهای هوشمند، مدیریت ترافیک از حالت ایستا به پویا و تطبیقی تبدیل میشود.
این نگرانی جدی و قابل بحث است. در شهرهای هوشمند پیشرفته، از روشهایی مانند پردازش لبهای، ناشناسسازی داده، محدودیت زمان نگهداری اطلاعات و رمزنگاری استفاده میشود تا تعادل بین ایمنی و حریم خصوصی حفظ شود. بدون چارچوب حقوقی شفاف، اعتماد عمومی شکل نمیگیرد.
با تحلیل کلانداده و استفاده از چراغهای راهنمایی تطبیقی، شهرهای هوشمند میتوانند جریان خودروها را بهینه کنند، توقفهای غیرضروری را کاهش دهند و مسیرهای جایگزین را پیشنهاد دهند. این رویکرد مبتنی بر پیشبینی است، نه صرفاً واکنش.
بله. در شهرهای هوشمند، زیرساختهای ترافیکی از طریق فناوری V2X با خودروهای متصل و خودران ارتباط برقرار میکنند. دوربینهای کنار جاده میتوانند اطلاعاتی فراتر از دید خودرو در اختیار آن قرار دهند و ایمنی را افزایش دهند.
پردازش لبهای (Edge AI) باعث میشود تحلیل تصویر در همان محل نصب دوربین انجام شود. این کار تأخیر را کاهش میدهد، مصرف پهنای باند را کم میکند و کنترل بهتری بر دادههای حساس ایجاد میکند؛ موضوعی که در معماری شهرهای هوشمند حیاتی است.
بله، اگر درست پیادهسازی شوند. بهینهسازی جریان ترافیک، اولویتدهی به حملونقل عمومی، کاهش توقفهای بیمورد و مدیریت ازدحام همگی میتوانند مصرف سوخت و انتشار آلایندهها را کاهش دهند. بنابراین، شهرهای هوشمند ابزار مهمی در سیاستهای زیستمحیطی هستند.
مهمترین چالشها شامل هزینه زیرساخت، امنیت سایبری، سوگیری الگوریتمی، کیفیت داده، چارچوبهای قانونی و جلب اعتماد عمومی است. بدون حل این مسائل، پروژههای شهرهای هوشمند ممکن است با مقاومت اجتماعی یا ناکارآمدی عملی مواجه شوند.
در بلندمدت بله. کاهش تصادفات، کاهش زمان سفر، صرفهجویی در سوخت، کاهش آلودگی و افزایش بهرهوری حملونقل عمومی میتواند هزینههای اجتماعی و اقتصادی را کاهش دهد. اگر هدف صرفاً جریمه نباشد، این سرمایهگذاری بازگشت قابل توجهی خواهد داشت.





