بررسی جامع سنسورهای تصویر CMOS PYTHON با کارایی بالا در سیستمهای سورتینگ سرعت بالا

سیستمهای سورتینگ مدرن در صنایع پردازش مواد غذایی، بازیافت، داروسازی و معدن به سنسورهای تصویری نیاز دارند که به طور همزمان رزولوشن فضایی بالا، نرخ فریم فوقالعاده، کیفیت تصویر بینظیر و مقاومت فیزیکی در شرایط…
سیستمهای سورتینگ مدرن در صنایع پردازش مواد غذایی، بازیافت، داروسازی و معدن به سنسورهای تصویری نیاز دارند که به طور همزمان رزولوشن فضایی بالا، نرخ فریم فوقالعاده، کیفیت تصویر بینظیر و مقاومت فیزیکی در شرایط سخت صنعتی را ارائه دهند. خانواده سنسورهای تصویر CMOS شاتر سراسری (Global Shutter) سری PYTHON، توسعهیافته توسط ON Semiconductor (که اکنون با نام onsemi شناخته میشود)، به عنوان یکی از راهکارهای پیشرو برای این کاربردهای سخت و حساس مطرح شده است.
این مقاله مرور و تحلیلی جامع بر معماری، طراحی پیکسل، قابلیتهای خوانش سرعت بالا (Readout)، محدوده دینامیکی (Dynamic Range) و حساسیت طیفی سنسورهای PYTHON در بستر سورتینگ نوری ارائه میدهد. با اتکا به اسناد فنی بهروز، مدلهای مختلف سنسور از PYTHON 300 کوچک تا PYTHON 25K بیست و شش مگاپیکسلی بررسی شده و نحوه یکپارچهسازی آنها با رابطهای مدرن نظیر USB3 Vision، GigE Vision، CoaXPress و Camera Link HS تشریح میشود.
تمرکز ویژهای بر دستیابی به نرخ خط (Line Rate) بسیار بالا در حالت اسکن خطی (Linescan Mode) با استفاده از سنسورهای مساحتی (Area Sensors) معطوف شده است؛ تکنیکی که به طور گسترده در ریزشنماها (Chute Sorters) و سورتینگهای تسمهنقالهای (Belt Sorters) به کار میرود. در نهایت، مقایسهای کمی میان این سنسورها و رقبای سرسختی همچون Sony Pregius، Gpixel GMAX و Teledyne e2v Emerald انجام گرفته و چالشهای پردازش دادههای چند گیگابیتی در ثانیه به کمک هوش مصنوعی (AI) بررسی میشود.
۱. مقدمه (Introduction)
سورتینگ نوری (Optical Sorting) به یکی از فناوریهای حیاتی و غیرقابل جایگزین در صنایع مدرن تبدیل شده است که کنترل کیفیت با نرخ بالا و به صورت غیرمخرب را تضمین میکند. در صنایع غذایی، سیستمهای خودکار باید مواد زائد فیزیکی را حذف کنند، بخشهای آسیبدیده محصولات را جدا سازند و آنها را بر اساس اندازه، شکل و رنگ با سرعتی فراتر از چندین تن در ساعت دستهبندی نمایند. در صنعت بازیافت، جداسازی انواع پلاستیکها، شیشهها و فلزات با خلوص بالا به تصویربرداری چندطیفی و رنگی وابسته است. در داروسازی نیز بررسی هر قرص با سرعتهای فراتر از ۱۰,۰۰۰ عدد در دقیقه انجام میشود.
قلب تپنده تمامی این سیستمها، سنسور تصویر است. این سنسور باید جریانی مداوم، واضح و بدون نویز از تصاویر را در شرایط نوری متغیر و همگام با حرکت سریع محصولات ثبت کند. در دهه گذشته، گذار تکنولوژیک از سنسورهای CCD به CMOS انقلابی بزرگ در تصویربرداری صنعتی ایجاد کرد. در این میان، خانواده سنسورهای PYTHON از شرکت onsemi نقشی کلیدی در توانمندسازی نسل جدید ماشینهای سورتینگ سرعت بالا ایفا کردهاند.
خانواده PYTHON (معرفی شده در سال ۲۰۱۴ و توسعهیافته در سالهای بعد) بازه گستردهای از رزولوشنها، از VGA تا ۲۶ مگاپیکسل را پوشش میدهد. نرخ فریم این سنسورها در رزولوشن کامل برای مدل PYTHON 300 به ۸۱۵ فریم بر ثانیه (fps) میرسد و برای مدل پرچمدار PYTHON 25K همچنان فراتر از ۸۰ فریم بر ثانیه است. ویژگیهای منحصربهفرد این سنسورها شامل شاتر سراسری واقعی با نمونهبرداری همبسته دوگانه (CDS)، حساسیت نوری انگلی (PLS) فوقالعاده پایین، حالتهای محدوده دینامیکی بالا (HDR) چندشیبه (Multi-slope)، و قابلیت انعطافپذیر تعریف ناحیه مورد نظر (ROI) است. این مشخصات، سنسورهای PYTHON را برای هندسه پیچیده اپتیکال در سورتینگهای سقوط آزاد، ریزشی و تسمهای ایدهآل میسازد.
۲. اصول سورتینگ نوری و نیازمندیهای تصویربرداری
۲.۱ پیکربندیهای مکانیکی و نرخ عبور مواد
سیستمهای سورتینگ مکانیکی به سه دسته اصلی تقسیم میشوند:
- سورتینگهای تسمهنقالهای (Belt Sorters): محصول روی یک تسمه افقی حرکت میکند و از بالا تصویربرداری میشود.
- سورتینگهای سقوط آزاد یا ریزشی (Chute Sorters): مواد روی یک صفحه شیبدار لیز میخورند و در میان هوا (در حالت سقوط آزاد) تصویربرداری و با جتهای هوا شلیک و جداسازی میشوند.
- سورتینگهای لولهای (Duct Sorters): مخصوص عبور مواد دانهای و پودری بسیار سریع.
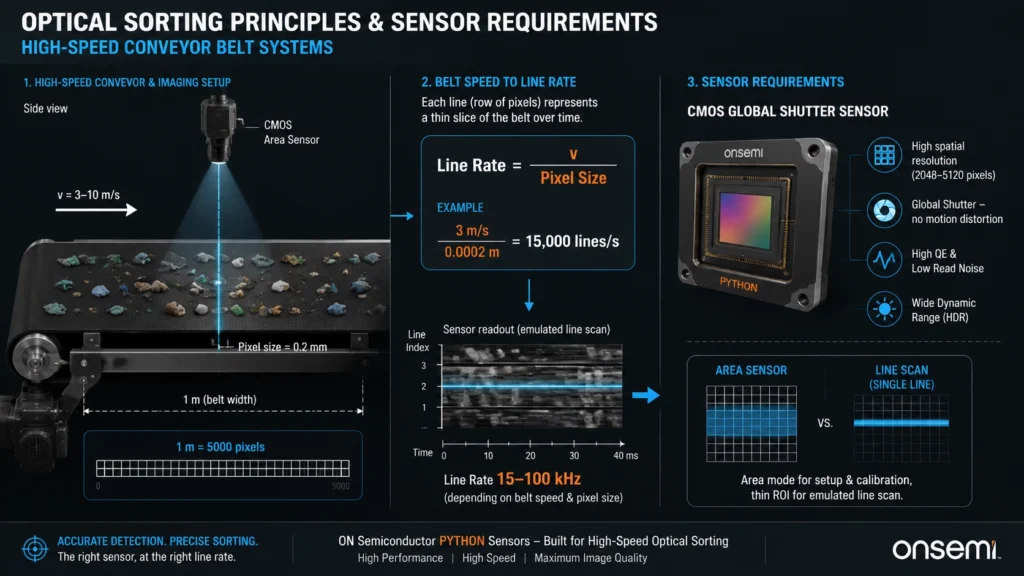
منطق و ریاضیات حاکم بر نرخ خط (Line Rate):
چرا به سرعتهای فوقالعاده بالا در سنسور نیاز داریم؟ فرض کنیم یک تسمهنقاله با عرض ۱ متر و سرعت حرکت
داریم. اگر بخواهیم دقت یا رزولوشن فضایی ما در راستای عرض تسمه برابر
باشد، به تعداد پیکسل افقی زیر نیاز داریم:
برای اینکه در راستای حرکت تسمه نیز تصویر کشیده یا فشرده نشود (یعنی پیکسلهای مربعی داشته باشیم)، سنسور باید هر بار که تسمه به اندازهی
حرکت میکند، یک خط تصویر ثبت کند. بنابراین نرخ خط مورد نیاز (Line Rate) به صورت زیر محاسبه میشود:
اگر سرعت تسمه به
افزایش یابد، یا سرعت سقوط آزاد در ریزشنماها به
برسد، به نرخ خطهای فراتر از ۵۰ کیلوهرتز تا ۱۰۰ کیلوهرتز نیاز خواهیم داشت. این سرعت سرسامآور فیزیکی، نیازمند معماری خاصی در سنسور اس
۲.۲ نیازمندیهای سنسور
با توجه به محاسبات فوق، مشخصات سنسور ایدهآل سورتینگ عبارتند از:
- رزولوشن فضایی بالا: حداقل ۲۰۴۸ تا ۵۱۲۰ پیکسل در راستای افقی.
- شاتر سراسری (Global Shutter): در شاترهای غلتان (Rolling Shutter)، سطرهای مختلف سنسور در زمانهای متفاوتی نوردهی میشوند. این امر در سرعتهای بالا (مثلاً ۳ تا ۱۰ متر بر ثانیه) منجر به اعوجاج هندسی شدید (ژلهای شدن تصویر) محصول میشود که الگوریتمهای طبقهبندی را به کل مختل میکند. شاتر سراسری با نوردهی همزمان تمام پیکسلها، تصویر را کاملاً فریز میکند.
- حساسیت بالا و نویز کم: به دلیل زمان نوردهی بسیار کوتاه (در حد چند میکروثانیه)، فوتونهای کمی به هر پیکسل میرسد. سنسور باید بازدهی کوانتومی (QE) بالا و نویز خوانش (Read Noise) بسیار پایینی داشته باشد تا نسبت سیگنال به نویز (SNR) حفظ شود.
- محدوده دینامیکی وسیع (HDR): در سورتینگ پلاستیک یا فلزات، قطعات براق منعکسکننده نور در کنار مواد تیره و کثیف قرار میگیرند. سنسور باید بدون اشباع شدن در نقاط براق، جزئیات نقاط تاریک را ثبت کند.
۲.۳ چرایی استفاده از سنسورهای مساحتی (Area) به جای خطی (Linescan)
به طور سنتی، دوربینهای خطی گزینه اصلی سورتینگ بودهاند. اما سنسورهای مساحتی خانواده PYTHON به چند دلیل منطقی جایگزین آنها شدهاند:
- انعطافپذیری کالیبراسیون: در زمان راهاندازی و کالیبراسیون سیستم، میتوان سنسور را در حالت مساحتی (Area Scan) کامل قرار داد تا تنظیمات فیزیکی دوربین، زاویه تابش نور و همراستایی مکانیکی به راحتی انجام شود.
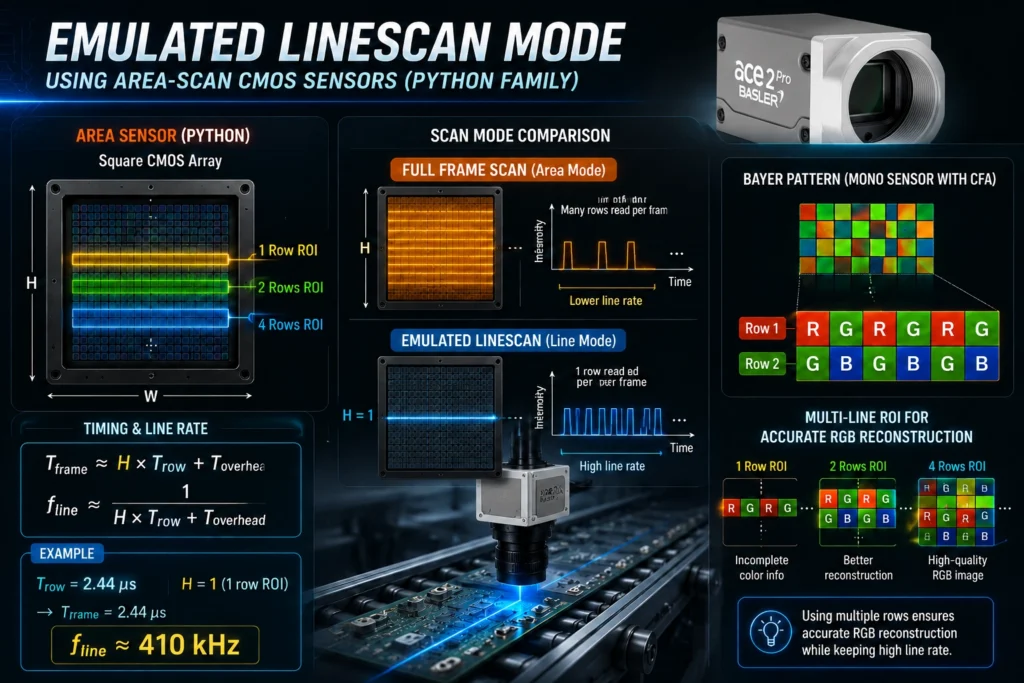
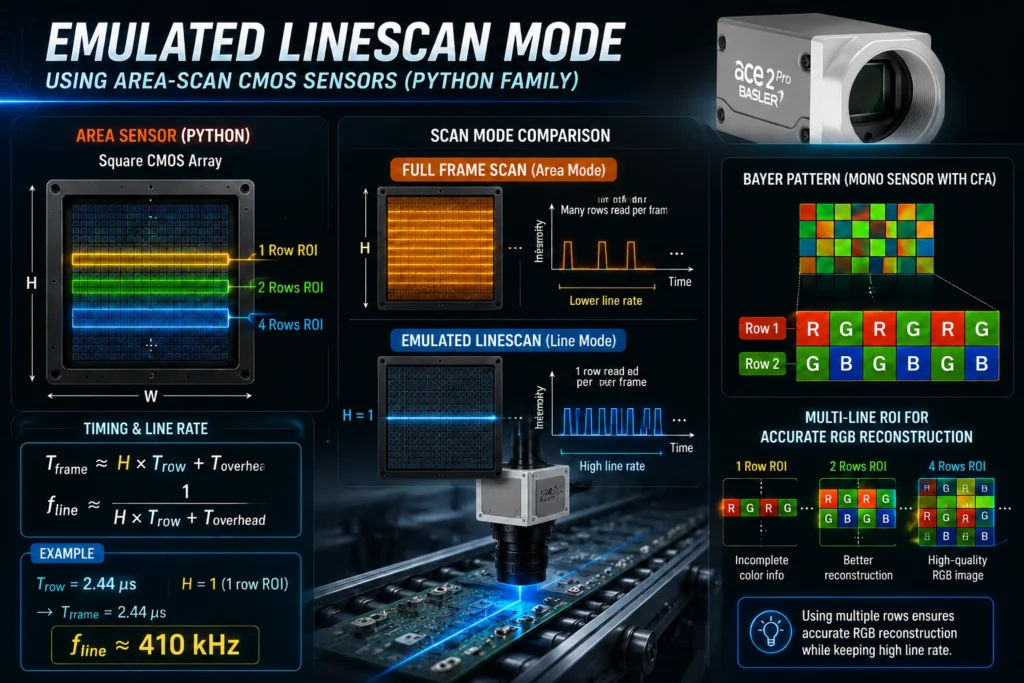
- پیکربندی نرمافزاری ROI: کاربر میتواند با کاهش نرمافزاری ارتفاع ناحیه فعال سنسور به چند سطر محدود (مثلا ۱ تا ۴ سطر)، سرعت سنسور مساحتی را به صورت خطی بالا ببرد (Emulated Linescan).
- تصویربرداری چندخطی با تاخیر زمانی: امکان پردازش موازی و مقایسه چند خط متوالی برای بهبود الگوریتمهای تفکیک رنگ وجود دارد.
۳. معماری خانواده سنسورهای تصویر PYTHON و ویژگیهای کلیدی
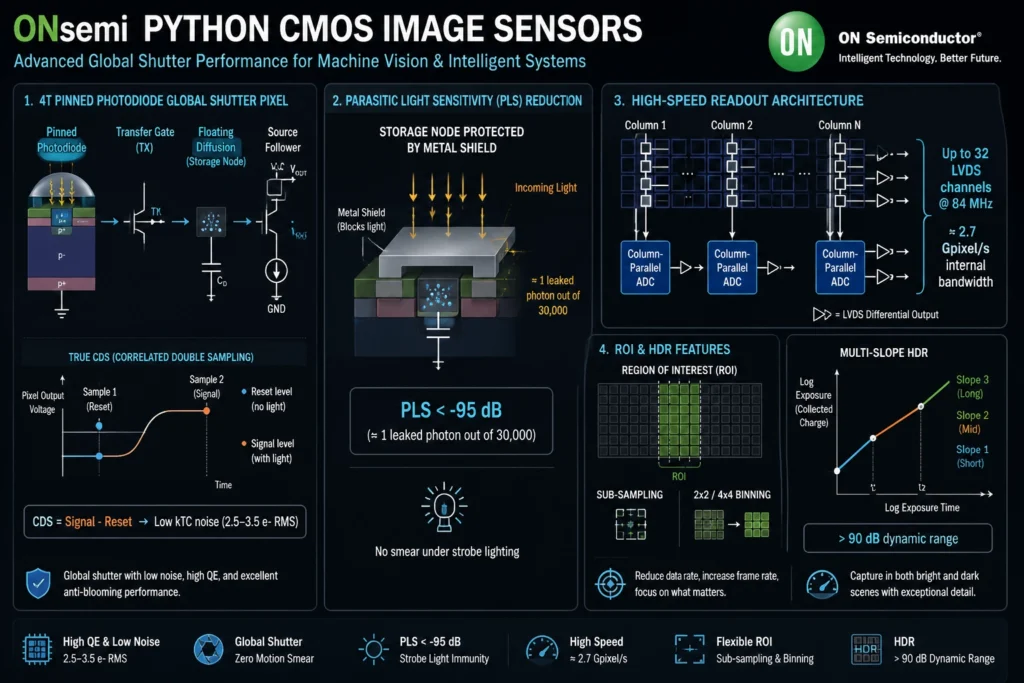
۳.۱ ساختار پیکسل شاتر سراسری با CDS واقعی
پیکسلهای سری PYTHON بر پایه معماری ۴ ترانزیستوری (4T) با دیود نوری پینشده (Pinned Photodiode) طراحی شدهاند.
[Photodiode] —> [Transfer Gate (TX)] —> [Storage Node (Floating Diffusion)] —> [Source Follower]
چرایی و منطق CDS در شاتر سراسری:
در سنسورهای شاتر سراسری قدیمی، نویز بازنشانی پیکسل (kTC Noise) بالا بود زیرا مقدار ولتاژ گره ذخیرهسازی (Floating Diffusion) قبل از انتقال بار الکتریکی مشخص نبود. سنسورهای PYTHON با پیادهسازی فیزیکی نمونهبرداری همبسته دوگانه (True Correlated Double Sampling – CDS) در حالت شاتر سراسری، ابتدا نویز گره ذخیرهسازی را در حالت بازنشانی (Reset) میخوانند، سپس بار الکتریکی فوتودیود را منتقل کرده و دوباره مقدار را ثبت میکنند. تفاضل این دو سیگنال، نویز ثابت و نویز kTC را حذف کرده و نویز خوانش را به حد بسیار پایین ۲.۵ تا ۳.۵ الکترون RMS میرساند.
۳.۲ حساسیت نوری انگلی (Parasitic Light Sensitivity – PLS)
یکی از مشکلات شاتر سراسری این است که وقتی بار الکتریکی از فوتودیود به گره ذخیرهسازی (مخزن موقت سطرها) منتقل میشود تا نوبت به خوانش آن برسد، نوری که همچنان به سنسور میتابد ممکن است به این گره نفوذ کند و تصویر دچار پدیده «شاتر نشتی» یا Smear شود. در سنسورهای PYTHON با طراحی شیلدهای فلزی بسیار دقیق نانومقیاس روی گرههای ذخیرهسازی، مقدار PLS به کمتر از 95dB- کاهش یافته است. این یعنی از هر ۳۰,۰۰۰ فوتون مزاحم تابیده شده به گره ذخیره، شاید تنها ۱ فوتون نشت کند که عملاً تأثیری روی کیفیت تصویر تحت نورهای بارقهای (Strobe) شدید ندارد.
۳.۳ معماری خوانش سرعت بالا (High-Speed Readout)
برای انتقال میلیاردها پیکسل در ثانیه، سنسورهای PYTHON از ساختار مبدلهای آنالوگ به دیجیتال موازی در سطح ستون (Column-Parallel ADC) استفاده میکنند. سیگنال آنالوگ هر ستون به طور همزمان به کدهای ۱۰ بیتی یا ۱۲ بیتی تبدیل میشود. سپس این دادههای دیجیتال روی چندین کانال خروجی LVDS (سیگنالدهی دیفرانسیلی ولتاژ پایین) مالتیپلکس میشوند. به عنوان مثال، سنسور PYTHON 25K دارای ۳۲ کانال خروجی LVDS است که هر کدام با فرکانس ۸۴ مگاهرتز کار میکنند و پهنای باند داخلی معادل ۲.۶۸۸ گیگاپیکسل بر ثانیه را فراهم میسازند.
۳.۴ قابلیتهای ROI (Region of Interest) و روشهای چندگانه
سنسورهای PYTHON به کاربر اجازه میدهند که ناحیه خوانش عمودی را با گامهای ۲ سطری محدود کند. با کاهش تعداد سطرهای خوانش، زمان لازم برای اسکن کل فریم به شدت کاهش یافته و نرخ فریم به صورت خطی افزایش مییابد. همچنین قابلیت Sub-sampling و Binning (ترکیب پیکسلهای مجاور ۲×۲ یا ۴×۴) به صورت سختافزاری تعبیه شده است تا بتوان با کاهش رزولوشن، حساسیت نوری و سرعت را به طور همزمان چند برابر کرد.
۳.۵ حالتهای محدوده دینامیکی بالا (HDR) چندشیبه (Multi-slope HDR)
در سیستمهای سورتینگ، وجود موادی با بازتابهای بسیار متفاوت (Specular Reflection) امری متداول است. سنسورهای PYTHON از تکنیک Multi-slope برای کنترل زمان نوردهی پیکسل در حین یک فریم واحد استفاده میکنند.
نمودار ولتاژ پیکسل (روشنایی) بر حسب زمان نوردهی:
ولتاژ پیکسل (روشنایی)
▲
شیب ۱: نوردهی کامل (نقاط تاریک)
شیب ۲: بازنشانی جزئی در زمان t₁ (نقاط میانی)
شیب ۳: بازنشانی دوم در زمان t₂ (نقاط بسیار روشن)
──────┼──────┼──────────▶ زمان نوردهی
t₁ t₂
پیکسلهایی که در معرض نور شدید قرار دارند، قبل از اینکه به مرحله اشباع کامل (Saturation) برسند، در بازههای زمانی مشخصی بازنشانی جزئی (Partial Reset) میشوند. این فرآیند باعث زانو زدن (Knee points) منحنی پاسخ نوری سنسور میشود و به سیستم اجازه میدهد تا جزئیات نقاط بسیار تاریک و بسیار روشن را در یک قاب تصویر بدون نیاز به پردازشهای نرمافزاری سنگین و با محدوده دینامیکی فراتر از ۹۰ دسیبل ثبت کند.
| مدل سنسور | رزولوشن فیزیکی | اندازه پیکسل (µm) | فرمت اپتیکال | حداکثر فریمریت (۱۰ بیت) | نویز خوانش (e⁻ RMS) | چاه کامل (Full Well) | محدوده دینامیکی (dB) | حداکثر نرخ داده |
|---|---|---|---|---|---|---|---|---|
| PYTHON 300 | 640 × 480 (VGA) | 4.8 | “1/4 | 815 fps | 2.5 | 12.5 ke⁻ | 60.1 | ~250 Mpix/s |
| PYTHON 500 | 800 × 600 (SVGA) | 4.8 | “1/3.6 | 560 fps | 2.6 | 12.8 ke⁻ | 60.3 | ~270 Mpix/s |
| PYTHON 1300 | 1280 × 1024 (SXGA) | 4.8 | “1/2 | 210 fps | 2.8 | 13.0 ke⁻ | 60.5 | ~275 Mpix/s |
| PYTHON 2000 | 1920 × 1200 (WUXGA) | 4.8 | “2/3 | 100 fps | 3.0 | 13.2 ke⁻ | 60.7 | ~276 Mpix/s |
| PYTHON 5000 | 2592 × 2048 (5.3 MP) | 4.8 | “1 | 100 fps | 3.2 | 13.5 ke⁻ | 60.8 | ~540 Mpix/s |
| PYTHON 25K | 5120 × 5120 (26.2 MP) | 4.5 | APS-H | 80 fps | 3.5 | 10.5 ke⁻ | 57.1 | 2688 Mpix/s |
۴.۱ تحلیل کاربردی مدلهای کوچک (PYTHON 300 & 500)
این دو سنسور برای سیستمهای سورتینگ تکلاین یا دوربینهای هوشمند (Smart Cameras) یکپارچه استفاده میشوند. نویز کم آنها به سیستمهای فلورسانس (که در آن نور ساطع شده بسیار ضعیف است) کمک شایانی میکند.
۴.۲ اسبهای کاری میانرده (PYTHON 1300 & 2000)
این سنسورها تعادل بینظیری میان سرعت خوانش خطی و فرمت اپتیکال ارائه میدهند. لنزهای مورد نیاز برای ابعاد ۱/۲ اینچ و ۲/۳ اینچ مقرونبهصرفه بوده و رزولوشن آنها برای سورتینگ خشکبار و قطعات الکترونیکی کوچک در سرعتهای متوسط کاملاً پاسخگوست.
۴.۳ مدل صنعتی پرطرفدار (PYTHON 5000)
با رزولوشن ۵.۳ مگاپیکسلی، این سنسور محبوبترین گزینه برای سورتینگ غلات و دانهها روی تسمههای عریض است. پهنای افقی ۲۵۹۲ پیکسلی آن به راحتی تسمههایی با عرض ۱.۲ متر را با دقت کافی پوشش میدهد.
۴.۴ پرچمدار غولپیکر (PYTHON 25K)
معرفی این سنسور با رزولوشن افقی ۵۱۲۰ پیکسل انقلابی در ماشینهای بازیافت زباله و پلاستیک ایجاد کرد. این سنسور عملاً نیاز به استفاده از چندین دوربین مجزا برای پوشش پهنای تسمههای عریض (بیش از ۲ متر) را مرتفع کرد. سرعت خوانش خطی آن در حالت تکخط به مقادیر نجومی ۴۵۱ کیلوهرتز در حالت ۸ بیتی دست مییابد که حتی از بسیاری از سنسورهای خطی اختصاصی نیز سریعتر است.
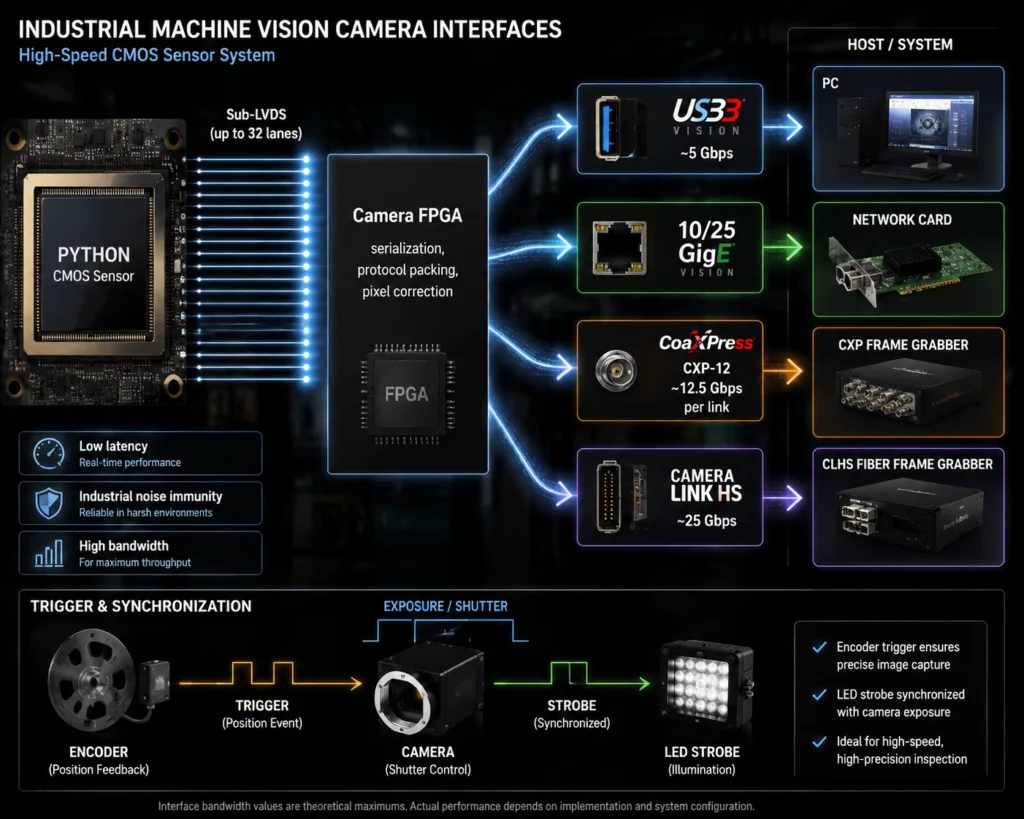
۵. رابطهای اتصال دوربین و یکپارچهسازی سیستم (Camera Interfaces)
چالش اصلی پس از خروج دادهها از مبدلهای آنالوگ به دیجیتال (ADC) سنسور آغاز میشود: چگونه این حجم عظیم از داده را به پردازنده منتقل کنیم؟
│ PYTHON Sensor │
(Sub-LVDS Lines – Up to 32 channels)
▼
Camera FPGA │ (Data serialization, protocol packing, pixel correction)
(USB3 Vision) (10/25 GigE) (CoaXPress CXP-12) (Camera Link HS)
▼ ▼ ▼ ▼ ▼
│ Host PC │ │ Host │ │ CXP Frame │ │ CLHS Frame │
│/Grabber │ │ Network │ │ Grabber │ │ Grabber │
│ Card
اینجا واقعاً ریشهی موضوع جالب میشود، چون ما با یک bottleneck فیزیکیـ الکتریکی روبهرو هستیم که مستقل از قدرت پردازشی CPU یا GPU است.
بیایید از ابتدا محاسبه کنیم. فرض کن یک سنسور PYTHON با این مشخصات:
- تعداد پیکسل در عرض:
- نرخ خط:
- عمق بیت:
پهنای باند خام مورد نیاز:
اگر به یا
برویم (برای دقت رنگ یا دینامیکرنج بیشتر)، یا نرخ خط را به
افزایش دهیم (برای سرعت بالاتر)، به راحتی به
میرسیم. این رقمها دیگر در محدودهی USB 2.0 یا Ethernet معمولی نمیگنجند.
حالا به معماری انتقال نگاه کن:
۱. خروجی سنسور (Sub-LVDS):
سنسور PYTHON از تا ۳۲ کانال Sub-LVDS موازی استفاده میکند تا دادههای چندین ستون پیکسل را همزمان به FPGA دوربین بفرستد. این موازیسازی ضروری است چون یک کانال سریال ساده نمیتواند این سرعت را تحمل کند. اما Sub-LVDS یک استاندارد ارتباطی صنعتی نیست؛ فقط یک اینترفیس point-to-point بین سنسور و FPGA است.
۲. FPGA دوربین (لایهی میانی حیاتی):
FPGA وظیفهی سنگین دارد:
- Serialization: تبدیل ۳۲ جریان موازی به یک یا چند جریان سریال پرسرعت
- Protocol Packing: قالببندی داده طبق استاندارد هدف (GigE Vision، CoaXPress، Camera Link و…)
- Pixel Correction: اعمال تصحیحات لحظهای مثل Bad Pixel Correction، Flat-field، یا حتی Shading Correction، که اگر در host انجام شوند، تأخیر غیرقابلقبول ایجاد میکنند.
۳. پروتکلهای انتقال (گزینههای مختلف با trade-offهای مشخص):
-
USB3 Vision (~5 Gbit/s واقعی): ارزان، plug-and-play، اما محدود به فواصل کوتاه (<3 متر) و تحمل کمتری نسبت به نویز صنعتی. مناسب برای سیستمهای کامپکت و Desktop.
-
10/25 GigE Vision: استاندارد شبکهای، فاصلهی بالا (تا ۱۰۰ متر با کابل مسی، بیشتر با فیبر)، اما overhead بالا به دلیل پروتکل TCP/UDP و نیاز به NIC قدرتمند با DMA offload. مناسب برای سیستمهای چند دوربینه یا distributed.
-
CoaXPress CXP-12 (~12.5 Gbit/s per link): طراحی شده برای machine vision، latency بسیار کم، و قابلیت ارسال trigger و power از همان کابل کواکسیال. اما نیاز به Frame Grabber اختصاصی دارد و هزینهبر است.
-
Camera Link HS (~25 Gbit/s aggregate): بیشترین پهنای باند، اما پیچیدهترین و گرانترین. معمولاً در خطوط سورتینگ صنعتی سنگین که هزاران تن در ساعت پردازش میشوند، ضروری میشود.
۵.۱ خروجی سنسور و پیکربندی Sub-LVDS
سنسورهای PYTHON دادهها را روی خطوط تفاضلی ولتاژ پایین (Sub-LVDS) با دامنه ولتاژ کم (معمولاً حدود ۰.۹ ولت) ارسال میکنند تا مصرف توان و نویز الکترومغناطیسی (EMI) به حداقل برسد. طراحان دوربین باید مسیرهای PCB را با امپدانس کنترلشده ۱۰۰ اهم طراحی کنند تا از انعکاس سیگنال در فرکانسهای بالا جلوگیری شود.
۵.۲ استانداردهای واسط بینایی ماشین
- USB3 Vision: برای پهنای باند تا ۳۵۰ مگابایت بر ثانیه مناسب است. برای مدلهای PYTHON 1300 و 2000 کارآمد است، اما برای PYTHON 25K در رزولوشن و سرعت بالا به شدت گلوگاه ایجاد میکند.
- GigE Vision: ارزان و ساده با کابلکشی طولانی، اما پهنای باند محدود به ۱۲۰ مگابایت بر ثانیه (مناسب برای سرعتهای پایین).
- CoaXPress (CXP): استاندارد طلایی سیستمهای سورتینگ سرعت بالاست. رابط CXP-12 پهنای باندی معادل ۱۲.۵ گیگابیت بر ثانیه به ازای هر کابل کواکسیال ارائه میدهد. با ترکیب ۴ کابل کواکسیال، دستیابی به سرعت ۵۰ گیگابیت بر ثانیه (بیش از ۵ گیگابایت در ثانیه) امکانپذیر میشود که پهنای باند سنسور PYTHON 25K را به طور کامل پوشش میدهد.
- Camera Link HS: رقیب مستقیم CoaXPress با تأخیر بسیار پایین و انتقال داده فوقالعاده پایدار از طریق فیبر نوری، بسیار مناسب برای محیطهای پر از نویز الکترومغناطیسی در معادن.
۵.۳ سنکرونسازی و کنترل نور استروبوسکوپیک
پالسهای انکودر مکانیکی که حرکت تسمهنقاله را اندازهگیری میکنند، به ورودی سختافزاری دوربین (Trigger) متصل میشوند. فازهای باز شدن شاتر و تحریک چراغهای LED (پالس نوری در حد ۱۰ میکروثانیه) باید در سطح نانوثانیه با یکدیگر هماهنگ باشند. به دلیل تأخیرهای معین سختافزاری در پردازنده داخلی سنسور PYTHON، پالس نوری باید دقیقاً در پنجره زمانی فعال بودن شاتر سراسری فلاش بزند تا بازدهی نوری حداکثر شود.
۶. پیادهسازی حالت اسکن خطی (Linescan Mode) با سنسورهای مساحتی
یکی از خلاقانهترین کاربردهای سنسورهای مساحتی PYTHON، شبیهسازی کارکرد دوربینهای خطی است.
۶.۱ فرمولاسیون نرخ خط در حالت اسکن خطی شبیهسازیشده
در سنسورهای سنتی، نرخ فریم کامل با رابطهی زیر مشخص میشود:
در سنسورهای مساحتی (Area-scan) معمولی، زمان زیادی صرف جاروب کردن (Scan) تمام سطرهای سنسور میشود. اما در سنسور PYTHON، میتوانیم رجیسترهای داخلی سنسور را از طریق درگاه SPI بهگونهای پیکربندی کنیم که تنها تعداد انگشتشماری سطر (مثلاً
) را بخواند. در این صورت، زمان فریم جدید به شکل زیر تقلیل مییابد:
برای سنسور PYTHON 25K، زمان خوانش یک سطر (
) تقریباً
است. اگر مقدار
باشد، نرخ خط معادل فرکانس زیر خواهد بود:
این قابلیت به مهندسان اجازه میدهد که با خرید یک دوربین مساحتی، عملاً یک دوربین خطی فوقالعاده سریع با رزولوشن ۵۱۲۰ پیکسل افقی در اختیار داشته باشند.
۶.۲ چرا سورتینگ به پیکربندی چندخطی (Multi-line ROI) نیاز دارد؟
در سورتینگ رنگی، نمیتوان تنها از یک خط داده استفاده کرد؛ زیرا فیلتر بایرلایه (Bayer Pattern) روی سنسور از پیکسلهای رنگی متناوب (یک خط سبز-قرمز، یک خط آبی-سبز) تشکیل شده است.
سطر اول: R G R G R G R G …
سطر دوم: G B G B G B G B …
بنابراین، برای بازسازی کامل اطلاعات رنگی RGB هر نقطه از محصول در حال حرکت، سیستم باید حداقل ۲ یا ۴ سطر متوالی را قرائت کرده و با اعمال الگوریتم درونیابی (Demosaicing) و در نظر گرفتن سرعت حرکت جسم، رنگ واقعی را بازسازی کند. سنسورهای PYTHON امکان ثبت و استخراج همزمان چند خط مجزا را به راحتی با حفظ سرعت بالا میسر میسازند.
۷. کیفیت تصویر و سازگاری با شرایط محیطی سخت
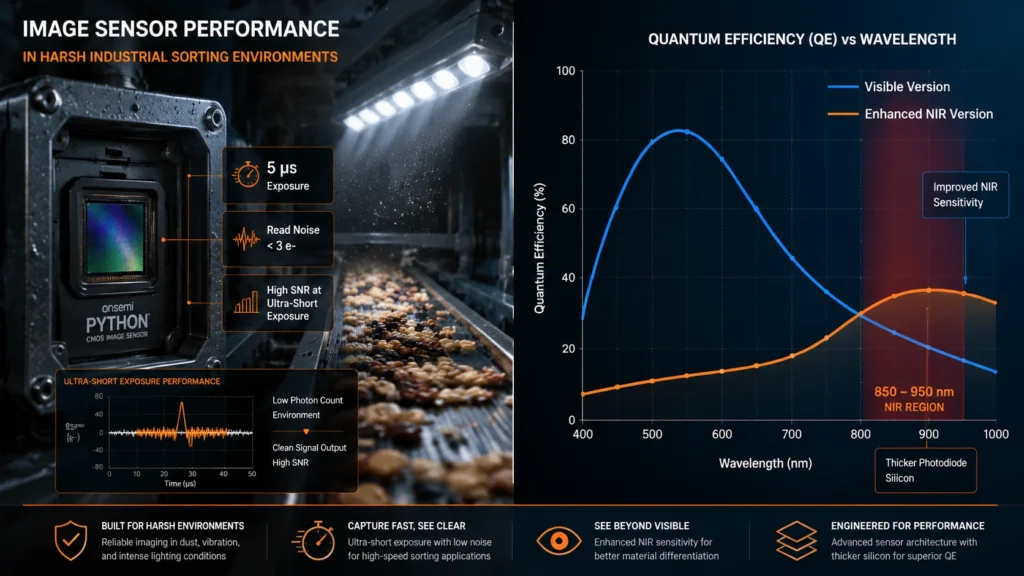
۷.۱ نویز و نسبت سیگنال به نویز (SNR) در نوردهیهای فوقکوتاه
در نوردهی ۵ میکروثانیه، جریان فوتونهای دریافتی پیکسل بسیار ناچیز است. در این حالت، نویز غالب در تصویر، نویز خوانش سنسور (Read Noise) است و نه نویز شات فوتونی. به همین دلیل، برخورداری از معماری CDS برای کاهش نویز خوانش به زیر ۳ الکترون در سنسورهای PYTHON، عاملی تعیینکننده در تشخیص عیوب ریز با کنتراست پایین (مانند لکههای ریز روی غلات) است.
۷.۲ حساسیت طیفی و گزینههای فروسرخ نزدیک (NIR)
بسیاری از ناخالصیهای فیزیکی در صنایع غذایی (مانند پوست گردو، سنگریزهها، پلاستیکها) رفتاری مشابه با محصول اصلی در طیف مرئی دارند. اما در طیف فروسرخ نزدیک (
)، بازتاب نوری آنها کاملاً متفاوت است.
نمودار بازدهی کوانتومی (QE %) بر حسب طول موج:
بازدهی کوانتومی (QE %)
▲
100
80
│ (نسخهی مرئی – Visible)
60
40
(نسخهی ارتقایافته NIR)
20
0 ───┼──────┼──────┼──────┼────────▶ طول موج (nm)
400 600 800 1000
شرکت onsemi نسخههای ویژهای از سنسورهای PYTHON را با سیلیکون ضخیمتر در لایهی فوتودیود عرضه میکند که بازدهی کوانتومی را در طول موج 859nm از 20 درصد به بیش از 35 درصد افزایش داده است. این امر شناسایی ناخالصیها را بدون نیاز به پروژکتورهای حرارتی و پرمصرف فروسرخ تسهیل میکند.
۸. مقایسه فنی سنسورهای PYTHON با رقبای سرسخت بازار
برای انتخاب هوشمندانه سنسور، مهندسان سیستمهای سورتینگ همواره گزینههای مختلف را با یکدیگر مقایسه میکنند. جدول زیر نمایی کلی از این مقایسه است:
| پارامتر کلیدی | ONsemi PYTHON 25K | Sony IMX530 (Pregius S) | Gpixel GMAX2505 | Teledyne e2v Emerald 16M |
|---|---|---|---|---|
| اندازه پیکسل | 4.5 µm | 2.74 µm | 2.5 µm | 2.8 µm |
| حداکثر نرخ خط در ۱ خط | 450 kHz | ~200 kHz | ~300 kHz | ~120 kHz |
| نویز خوانش | 3.5 e⁻ | 2.4 e⁻ | 3.0 e⁻ | 5.0 e⁻ |
| ظرفیت چاه کامل (Full Well) | 10.5 ke⁻ | 10.0 ke⁻ | 8.0 ke⁻ | 7.0 ke⁻ |
| بلوغ اکوسیستم در اروپا | بسیار بالا | بالا | متوسط | متوسط |
تحلیل منطقی مقایسه:
- چرا سنسور Sony IMX530 نویز کمتری دارد اما انتخاب اول سورتینگهای بسیار سریع نیست؟
سنسورهای نسل چهارم سونی (خانوادهی Pregius S) با پیکسلهای کوچک
رزولوشن بالایی در ابعاد فیزیکی فشرده ارائه میدهند و نویز خواندن (Read Noise) آنها بهلطف معماری BSI و مبدلهای ADC ستونی، بسیار پایین است. اما گلوگاه اصلی، معماری خوانش است، نه کیفیت تکپیکسل:
- این سنسورها برای عکاسی تمامفریم و نرخفریمهای متعارف بهینه شدهاند، نه برای خوانش انفجاری یک یا چند سطر.
- پهنای باند رابط دیجیتال داخلی و معماری خوانش موازی ستونها، در حالت اسکن خطی (Line Scan) عملاً به سقفی در حدود ۳۰۰ کیلوهرتز محدود میشود.
- در مقابل، سنسور PYTHON 25K با قابلیت Row Windowing و خوانش بسیار سریع سطرها، میتواند فراتر از ۴۰۰ کیلوهرتز کار کند و همین، آن را برای سورتینگهای با سرعت سقوط آزاد بالا (مانند بازیافت) بیرقیب نگه میدارد.
به بیان دقیقتر: در سورتینگ فوقسریع، آنچه تعیینکننده است حداکثر نرخ خط است، نه پایینترین نویز. IMX530 در «کیفیت» برنده است، اما در «سرعت خوانش» بازنده.
- چرا پیکسل بزرگتر PYTHON یک مزیت است؟ دراینجا به یک اصل بنیادین در فیزیک حسگرها میرسیم: ظرفیت چاه پتانسیل (Full Well Capacity) و سطح جمعآوری فوتون.
پیکسل
سنسور PYTHON سطح مقطع بزرگتری برای دریافت فوتون دارد. اگر نسبت ابعاد را در نظر بگیریم:
یعنی هر پیکسل PYTHON تقریباً ۲٫۷ برابر فوتون بیشتری نسبت به پیکسل IMX530 در همان بازهی نوردهی جمع میکند.
چرایی اهمیت این موضوع در سورتینگ:
- زمان نوردهی در این کاربردها بسیار کوتاه است (مثلاً ) تا تصویر اجسام پرسرعت بدون تاری (Motion Blur) ثبت شود.
- در چنین زمان کوتاهی، تعداد فوتونهای در دسترس بهشدت محدود است. پیکسل بزرگتر سیگنال قویتری تولید میکند و در نتیجه نسبت سیگنال به نویز (SNR) عملیاتی بالاتری دارد، حتی اگر نویز پایهاش کمی بیشتر از IMX530 باشد.
- پیکسلهای بسیار ریز (مانند برخی سنسورهای Gpixel) برای رسیدن به همان SNR در زمانهای کوتاه، نیازمند منابع نوری بسیار قدرتمند و پرهزینهاند که هزینه و گرمای سیستم را بالا میبرد.
جمعبندی منطق طراحی: در عکاسی ثابت، پیکسل ریز و کمنویز برنده است؛ اما در سورتینگ پرسرعت که نور کم و زمان کوتاه است، پیکسل بزرگ + خوانش سریع بر کمنویز بودن صرف ارجحیت دارد. به همین دلیل PYTHON انتخاب نخست این صنعت باقی مانده است.
۹. نقش و سهم صنایع و مراکز تحقیقاتی آلمان و اروپا در توسعه این فناوری
اکوسیستم بینایی ماشین آلمان (بزرگترین در اروپا) بستر اصلی تجاریسازی و بکارگیری سنسورهای PYTHON بوده است.
۹.۱ شرکتهای سازنده دوربین در آلمان
شرکتهایی مانند Basler AG و IDS Imaging Development Systems با طراحی بردهای الکترونیکی بسیار پیشرفته پیرامون سنسورهای PYTHON، قابلیتهایی نظیر اصلاح عدم یکنواختی فلتفیلد (Flat-Field Correction) و سیستمهای خنکسازی غیرفعال اختصاصی را توسعه دادند. این قابلیتها به سنسور اجازه میدهند تا در محیطهای گرم کارخانهها کارایی خود را بدون افت کیفیت تصویر حفظ کند.
۹.۲ موسسات تحقیقاتی فراونهوفر (Fraunhofer Institutes)
- موسسه Fraunhofer IIS (ارلانگن): این موسسه تحقیقات گستردهای روی فشردهسازی بیاتلاف دادههای تصویری خروجی از سنسور PYTHON انجام داده تا نیاز به استفاده از فریمگربرهای گرانقیمت کاهش یابد.
- موسسه Fraunhofer IPM: توسعه سیستمهای سورتینگ طیفسنجی توزیعشده برای بازیافت پلیمری پلاستیکها با استفاده از پهنای باند و نرخ خط بالای PYTHON 25K از دستاوردهای بارز این مرکز است.
۱۰. مطالعات موردی واقعی (Case Studies)
۱۰.۱ سورتینگ رنگی و فروسرخ خشکبار (پسته و بادام)
در یک کارخانه بزرگ فرآوری پسته و بادام در اروپا، از سه دوربین Basler boost مجهز به سنسور PYTHON 25K استفاده میشود. تسمهنقاله با سرعت حرکت میکند. دوربینها با ترکیب نورهای استروبوسکوپی مرئی و فروسرخ نزدیک (NIR) کار میکنند. سیستم با نرخ خط ۱۸۰ کیلوهرتز اطلاعات را ثبت میکند.
- منطق کارکرد: پوستههای توخالی پسته، مغزهای خراب، و سنگریزهها بلافاصله به دلیل تفاوت بازتاب در طیف NIR از پستههای سالم تفکیک شده و جتهای هوای فشرده با تاخیر زمانی دقیقاً محاسبهشده، مواد زائد را در میان زمین و هوا شکار میکنند.
۱۰.۲ سورتینگ پرسرعت پلاستیکهای بازیافتی (Flake Sorting)
در بازیافت بطریهای پت (PET) و تبدیل آنها به پرک (Flakes)، سیستم سورتینگ ریزشی باید پرکها را با سرعت بالا تفکیک کند. استفاده از سنسور PYTHON 5000 در یک پکیج دوربین با رابط CoaXPress در کنار یک فیلتر اپتیکال چندطیفی، اجازه میدهد تا انواع پلیمرهای PET، HDPE و PP با نرخ عبور ۵ تن در ساعت و با دقت خلوص بالای ۹۸٪ جداسازی شوند.
۱۱. چالشهای پردازش تصاویر با سرعت بالا و راهکارهای آن
پروتکلهای پردازش دادههای با نرخ بالا با چالشهای بزرگی روبرو هستند:
[ Sensor Out: 2.048 GB/s Raw Data ]
↓
─────────────────
│ FPGA Board │ ← اعمال فیلترهای اولیه و آشکارسازی لبهها در سطح پیکسل
─────────────────
↓ (کاهش پهنای باند داده)
─────────────────
│ Nvidia GPU │ ← استنتاج با مدلهای یادگیری عمیق (CNN) جهت طبقهبندی
─────────────────
↓
[ Ejector Control ] ← فعالسازی جتهای هوا با جیتر زیر ۵۰ میکروثانیه
۱۱.۱ منطق پردازش در سطح FPGA
انتقال پهنای باند ۲ گیگابایت بر ثانیه به پردازندههای اصلی کامپیوتر (CPU) عملاً باعث قفل شدن سیستمعامل میشود. راهکار طراحیشده، استفاده از بوردهای پردازشی مجهز به FPGA (مانند سیستمهای مجهز به چیپهای زایلینکس یا اینتل آلترای نصب شده درون دوربین یا کارت فریمگربر) است. این تراشهها کار پیشپردازش تصویر را به صورت سختافزاری و موازی انجام داده و تنها مختصات اهداف شناسایی شده را برای تصمیمگیری نهایی به کامپیوتر ارسال میکنند.
۱۱.۲ لوله پردازشی هیبریدی (FPGA + GPU) برای هوش مصنوعی
برای تفکیکهای پیچیده (مانند تشخیص خلوص سنگهای معدنی یا طبقهبندی کیفیت میوهها)، الگوریتمهای سنتی مبتنی بر آستانهگذاری رنگی کافی نیستند. در این سیستمها، ابتدا FPGA مناطق دارای شیء (Object proposals) را استخراج کرده و سپس این قطعه تصاویر کوچک را با پهنای باند بسیار پایینتر برای پردازش ثانویه به کارتهای گرافیکی قدرتمندی مانند Nvidia Jetson ارسال میکند تا مدلهای شبکههای عصبی پیچیده نظیر ResNet روی آنها اجرا شوند.
۱۲. چشمانداز آینده و فناوریهای نوظهور
۱۲.۱ عبور از مرز ۵۰ مگاپیکسل با فناوری stacked BSI
چرا فناوری آینده به سمت سنسورهای سهبعدی لایهای (Stacked BSI) میرود؟ در سنسورهای کنونی سری PYTHON، مدارهای الکترونیکی ترانزیستورها در کنار فوتودیودها قرار دارند که این امر بخشی از فضای مفید جذب نور (Fill Factor) را اشغال میکند. در نسلهای جدیدتر، مدارها به لایه زیرین منتقل میشوند تا فوتودیودها ۱۰۰٪ سطح پیکسل را پوشش داده و بازدهی نوری و سرعت خوانش به شدت افزایش یابد.
۱۲.۲ سنسورهای بینایی رویدادمحور (Event-Based Sensors)
این سنسورها برخلاف سنسورهای فریممحور معمولی، تصویر کامل ارسال نمیکنند. آنها فقط تغییرات شدت نور هر پیکسل را به صورت مستقل گزارش میدهند. در سیستمهای سورتینگ خلوت که محصولات با فاصله عبور میکنند، سنسورهای رویدادمحور میتوانند مصرف انرژی و حجم پردازش داده را تا ۹۰٪ کاهش دهند.
۱۳. نتیجهگیری (Conclusion)
خانواده سنسورهای تصویر CMOS سری PYTHON از شرکت onsemi به عنوان یک انتخاب بسیار مطمئن، منعطف و فوقالعاده سریع در معماری سیستمهای سورتینگ مدرن شناخته میشود. قابلیت استفاده از این سنسورهای مساحتی در حالت شبیهسازی اسکن خطی با سرعتهای بیش از ۴۰۰ کیلوهرتز، در کنار شاتر سراسری واقعی و پایداری نوری عالی (PLS پایین)، هزینههای ساخت ماشینآلات صنعتی را به شدت کاهش داده است.
همکاری تنگاتنگ میان تکنولوژی توسعهیافته در ایالات متحده و دانش سختافزاری و نرمافزاری مهندسی صنایع ماشین بینایی در اروپا (به ویژه آلمان)، باعث شده است تا این سنسورها در خط مقدم گذار به سمت بازیافت هوشمند پلاستیک و افزایش ایمنی مواد غذایی در مقیاس جهانی قرار گیرند. هماهنگی بینقص این سختافزار با پردازشهای نوین مبتنی بر FPGA و هوش مصنوعی، تداوم حضور موفق این خانواده از سنسورها را در سالهای آتی تضمین میکند.
برای انتخاب سنسورهای PYTHON مناسب پروژه سورتینگ خود نیاز به راهنمایی دارید؟
در سیستمهای سورتینگ پرسرعت، انتخاب سنسور فقط به رزولوشن محدود نمیشود؛ باید به فریمریت، Global Shutter، نرخ داده، اندازه پیکسل، کیفیت تصویر و نوع رابط انتقال هم توجه کرد تا تشخیص محصول، عیب یا ناخالصی با دقت پایدار انجام شود.
مشخصات پروژه، سرعت نوار، نوع محصول و شرایط نوری را ارسال کنید تا پیشنهاد فنی + انتخاب سنسور مناسب دریافت کنید.
سنسورهای PYTHON خانوادهای از سنسورهای تصویر صنعتی CMOS هستند که برای تصویربرداری پرسرعت، دقیق و پایدار طراحی شدهاند. این سنسورها در کاربردهایی مثل سیستمهای سورتینگ نوری، بینایی ماشین، بازرسی صنعتی، بستهبندی، صنایع غذایی، دارویی و بازیافت استفاده میشوند.
چرایی اهمیت این موضوع:
در سورتینگ صنعتی، تصمیمگیری باید در کسری از ثانیه انجام شود. بنابراین سنسوری لازم است که هم سرعت بالایی داشته باشد و هم تصویر را بدون اعوجاج حرکتی ثبت کند؛ جایی که سنسورهای PYTHON ارزش خود را نشان میدهند.
چون این سنسورها ترکیبی از فریمریت بالا، Global Shutter، نرخ داده زیاد و کیفیت تصویر مناسب را ارائه میکنند. این ویژگیها باعث میشوند اشیای متحرک روی نوار نقاله با دقت بیشتری شناسایی و تفکیک شوند.
دلیل فنی:
در خطوط سورتینگ، محصول دائماً در حرکت است. اگر سنسور نتواند همزمان سرعت و وضوح کافی را فراهم کند، احتمال خطا در تشخیص رنگ، شکل یا عیب محصول بالا میرود.
Global Shutter باعث میشود تمام پیکسلها در یک لحظه نوردهی شوند. نتیجه این است که تصویر اجسام متحرک بدون کشیدگی و اعوجاج ثبت میشود.
چرا مهم است؟
در سورتینگ پرسرعت، محصول ممکن است با سرعت بسیار بالا از مقابل دوربین عبور کند. اگر از Rolling Shutter استفاده شود، بخشهای مختلف تصویر در زمانهای متفاوت ثبت میشوند و این میتواند تشخیص را خراب کند.
مهمترین مزیت آنها طراحی صنعتی برای کاربردهای Machine Vision است، نه صرفاً تصویربرداری عمومی. یعنی ساختار آنها برای پایداری، کنترلپذیری، سرعت بالا واز قابل اعتماد در محیطهای صنعتی بهینه شده است.
چرایی این تفاوت:
نیاز صنعت فقط «تصویر زیبا» نیست؛ بلکه «تصویر قابل اتکا برای تصمیمگیری ماشینی» است. سنسور صنعتی باید در نور متغیر، سرعت بالا و ساعات کاری طولانی هم عملکرد ثابت داشته باشد.
بله، این سنسورها برای سورتینگ مواد غذایی مانند حبوبات، خشکبار، مغزها، سبزیجات و محصولات فرآوریشده بسیار مناسباند؛ چون میتوانند تفاوتهای ظریف رنگ، لکه، خرابی یا جسم خارجی را با دقت بیشتری ثبت کنند.
چرا؟
در صنایع غذایی، کوچکترین خطا میتواند روی کیفیت نهایی محصول و اعتماد مشتری اثر بگذارد. سنسوری که فریمریت بالا و کیفیت تصویر پایدار داشته باشد، احتمال تشخیص بهتر را افزایش میدهد.
Line Scan Mode به سنسور اجازه میدهد بهجای ثبت فریم کامل، خطوط تصویری را با سرعت بسیار بالا بخواند. این ویژگی برای خطوط تولید و سورتینگ پیوسته بسیار مهم است.
دلیل کاربردی:
وقتی جسم روی نوار نقاله بهصورت مداوم حرکت میکند، line scan میتواند یک روش بسیار کارآمد برای تصویربرداری از سطح محصول باشد؛ بهویژه در کاربردهایی که عرض ثابت و سرعت عبور بالا است.
خیر. این سنسورها علاوه بر سورتینگ، در بینایی ماشین، بازرسی کیفیت، رباتیک صنعتی، اندازهگیری دقیق، تجهیزات آزمایشگاهی و تصویربرداری خودکار هم کاربرد دارند.
چرا این تنوع وجود دارد؟
چون ویژگیهایی مثل Global Shutter، فریمریت بالا و کنترلپذیری در بسیاری از سامانههای صنعتی ارزشمند هستند، نه فقط در تفکیک و سورتینگ.
فریمریت بالا باعث میشود سیستم در هر ثانیه تصاویر بیشتری از محصول بگیرد. در نتیجه، احتمال از دست رفتن جزئیات یا عبور اشیای معیوب بدون شناسایی کمتر میشود.
چرایی اصلی:
در سورتینگ، زمان بسیار محدود است. هرچه نرخ تصویربرداری بیشتر باشد، الگوریتم بینایی ماشین اطلاعات بیشتری برای تحلیل خواهد داشت و تصمیمگیری دقیقتر میشود.
سنسورهای PYTHON در بازار سنسورهای صنعتی، بهویژه در کاربردهای پرسرعت، به خاطر ترکیب مناسب سرعت، رزولوشن، حالتهای خوانش و معماری Global Shutter شناخته میشوند. البته انتخاب نهایی همیشه به نیاز پروژه، نور، پهنای باند، اندازه میدان دید و بودجه بستگی دارد.
چرا این پاسخ مطلق نیست؟
چون هیچ سنسوری برای همه پروژهها بهترین گزینه نیست. برتری واقعی همیشه در نسبت میان نیاز کاربرد و مشخصات فنی معنا پیدا میکند.
باید به رزولوشن، فریمریت، اندازه پیکسل، نوع شاتر، نرخ داده، رابط انتقال تصویر، شرایط نور، سرعت نوار نقاله و نیاز پردازشی سیستم توجه کرد.
چرایی این معیارها:
سنسور بهتنهایی تصمیمگیر نیست؛ بلکه بخشی از یک زنجیره است. اگر سنسور سریع باشد اما لینک انتقال داده، لنز یا پردازشگر نتواند با آن هماهنگ شود، کل سیستم دچار گلوگاه میشود.





