بینایی ماشین در تشخیص پلاک خودرو: از تصویر تا متن

تشخیص خودکار شماره پلاک خودرو (ALPR)، که گاهی با عنوان شناسایی خودکار پلاک شماره (ANPR) نیز شناخته میشود، به یکی از برنامههای اصلی بینایی ماشین تبدیل شده است. این سیستمها قادرند در زمان واقعی پلاک…
تشخیص خودکار شماره پلاک خودرو (ALPR)، که گاهی با عنوان شناسایی خودکار پلاک شماره (ANPR) نیز شناخته میشود، به یکی از برنامههای اصلی بینایی ماشین تبدیل شده است. این سیستمها قادرند در زمان واقعی پلاک خودروها را شناسایی، خوانش و تفسیر کنند. با ترکیب سختافزار تصویربرداری با وضوح بالا و الگوریتمهای پیشرفته بینایی کامپیوتری، سیستمهای ALPR امکان انجام وظایفی از قبیل اخذ عوارض، پایش ترافیک، یگانهای انتظامی و کنترل دسترسی امن را فراهم میآورند. با افزایش حجم ترافیک خودروها در سراسر جهان و تلاش شهرها برای هوشمندسازی زیرساختها، نیاز به راهحلهای تشخیص پلاک دقیق، سریع و مقاوم بیش از پیش احساس میشود. رویکردهای مدرن بینایی ماشین با بهرهگیری از پیشرفتهای یادگیری عمیق، شناسایی اپتیکال حروف (OCR) و پردازش مرزی، مرزهای عملکرد ALPR را حتی در شرایط محیطی چالشی گسترش دادهاند.
پیشینه تاریخی بینایی ماشین در تشخیص پلاک خودرو
اولین تلاشها برای تشخیص پلاک به دهه ۱۹۷۰ و ۱۹۸۰ بازمیگردد، زمانی که سیستمهای نوری ابتدایی سعی در جداسازی و تطبیق الگوهای حروف داشتند اما به دلیل وابستگی زیاد به شرایط نورپردازی کنترلشده و قالبهای استاندارد پلاک، در دنیای واقعی چندان موفق نبودند. در دهه ۱۹۹۰، پژوهشها با استفاده از تکنیکهای پیشرفتهتر پردازش تصویر مانند آشکارسازی لبه، عملیات ریختشناختی و فیلترهای مبتنی بر رنگ بهبودهایی را در مکانیابی پلاک و جداسازی حروف به ارمغان آوردند. با این حال، دقت به ندرت از ۸۰–۸۵٪ در آزمایشهای میدانی فراتر میرفت و نیاز به پژوهشهای بیشتر بر مبنای یادگیری ماشین را بیش از پیش آشکار میکرد.

جریان کاری بینایی ماشین در تشخیص پلاک برای ALPR
دریافت تصویر و پیشپردازش
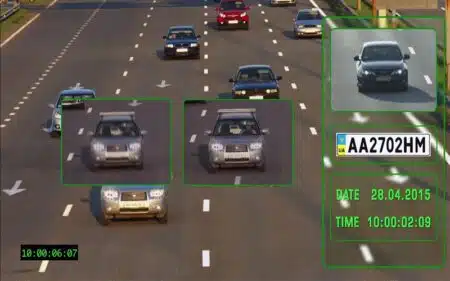
خط لوله ALPR با دریافت تصویر آغاز میشود؛ جایی که دوربینها—که معمولاً در کنار جاده یا بر خودروها نصب میشوند—تصاویر ثابت یا فریمهای ویدیویی حاوی یک یا چند خودرو را ضبط میکنند. این تصاویر تحت مراحل پیشپردازشی مانند حذف نویز، بهبود کنتراست و اصلاح هندسی قرار میگیرند تا نوسانات نور و دید در زوایا به حداقل برسد. تکنیکهایی مانند تراز هیستوگرام و آستانهگذاری تطبیقی کمک میکنند تا سایهها و بازتابها کاهش یابند و تبدیلهای آفاین نیز برای اصلاح مایل بودن پلاک بهکار میروند. پیشپردازش مستحکم پایهای قوی برای مراحل بعدی فراهم میآورد تا کنتراست بین حروف پلاک و پسزمینه به حداکثر برسد.
مکانیابی پلاک
پس از پیشپردازش، سیستم باید پلاک را در صحنه بهطور دقیق پیدا کند. روشهای سنتی از ویژگیهای مبتنی بر لبه—که شکل مستطیلی پلاک را تشخیص میدهند—و مدلهای توزیع رنگ که سطح بازتابنده پلاک را متمایز میکنند، بهره میگرفتند. امروزه، آشکارسازهای مبتنی بر یادگیری عمیق مانند YOLO (You Only Look Once) و Faster R-CNN انقلابی در مکانیابی پلاک ایجاد کردهاند و توان پردازش بلادرنگ و نرخ تشخیص بالاتری حتی در صحنههای پیچیده ارائه میکنند. این آشکارسازها با استفاده از مجموعه دادههای بزرگ و برچسبگذاریشده از انواع پلاکها آموزش دیدهاند تا عملکردی مقاوم در مناطق جغرافیایی گوناگون داشته باشند.
جداسازی حروف
پس از مکانیابی پلاک، مرحله جداسازی حروف وظیفه جداسازی نمادهای الفبایی و عددی را بر عهده دارد. رویکردهای گذشته به پروفایلهای پرتاب و تحلیل کانتورها وابسته بودند تا حروف را از هم جدا کنند، اما در مواجهه با حروف متصل یا پسزمینههای نویزی دچار مشکل میشدند. سیستمهای مدرن از شبکههای عصبی کانولوشنی (CNN) برای انجام جداسازی انتها به انتها استفاده میکنند و گاهی جداسازی و تشخیص را در یک شبکه واحد ترکیب میکنند. این جداسازی مبتنی بر CNN میتواند خود را با سبکهای فونت، فاصله حروف و ابعاد پلاکهای مختلف تطبیق دهد و دقت تشخیص را بهطور قابل توجهی افزایش دهد.
شناسایی اپتیکال حروف (OCR)
مرحله نهایی—OCR—تصاویر حروف جداسازیشده را به متن قابل خوانش توسط ماشین تبدیل میکند. موتورهای OCR سنتی مبتنی بر تطبیق الگو یا استخراج ویژگی همراه با طبقهبندهایی مانند ماشین بردار پشتیبان (SVM) بودند. اما امروزه شبکههای عمیق بازگشتی (RNN) و شبکههای عصبی ترکیبی کانولوشن و بازگشتی (CRNN) میدان را در دست گرفتهاند، چرا که قابلیت مدلسازی دادههای ترتیبی و وابستگیهای متنی بین حروف را دارا هستند. تشخیصهای مبتنی بر CRNN اغلب از تابع هزینه CTC (Connectionist Temporal Classification) استفاده میکنند تا تطابق توالی حروف پیشبینیشده با دادههای آموزشی را بدون نیاز به ورودیهای پیشجداسازیشده بهبود بخشند.

الگوریتمها و تکنیکها بینایی ماشین در تشخیص پلاک
بینایی ماشین در ALPR به لطف پیشرفتهای یادگیری عمیق بسیار پیشرفت کرده است. تکنیکهای کلیدی عبارتند از:
-
تشخیص پلاک مبتنی بر YOLO: چارچوبهای تشخیص اشیاء بلادرنگ مانند YOLOv5 میتوانند ویدیو با وضوح بالا را بیش از ۳۰ فریم در ثانیه پردازش کرده و با دقت بیش از ۹۵٪ پلاکها را شناسایی کنند.
-
تشخیص مبتنی بر CRNN: شبکههایی که استخراجگرهای ویژگی CNN را با لایههای LSTM دوجهته ترکیب میکنند، پیشبینی توالی حروف با طول متغیر را بدون نیاز به جداسازی صریح انجام میدهند.
-
افزایش داده (Data Augmentation): تولید دادههای مصنوعی با تغییرات روشنایی، چرخش، تاری و نویز، به آموزش مدلهایی کمک میکند که بر اعوجاجهای دنیای واقعی تسلط داشته باشند.
-
یادگیری انتقالی (Transfer Learning): استفاده از شبکههای پیشآموزشدیده مانند ResNet یا EfficientNet سرعت همگرایی را افزایش داده و عملکرد را بهویژه در مجموعه دادههای منطقهای محدود بهبود میبخشد.
چالشها و راهحلها
با وجود پیشرفتهای قابل توجه، سیستمهای ALPR هنوز با چالشهای پایداری روبهرو هستند:
-
شرایط نوری و جوی: تابش شدید خورشید، بازتابها، قطرههای باران و نور شب میتوانند کیفیت تصویر را کاهش دهند. استفاده از نور مادون قرمز، تصویربرداری با محدوده دینامیک بالا (HDR) و الگوریتمهای آستانهگذاری تطبیقی میتواند این مشکلات را کاهش دهد.
-
مسدودشدگی و تاری حرکت: پلاک ممکن است توسط گرد و غبار، قابها یا سرعت بالا مخدوش شود. سرعت شاتر بالا، تکنیکهای رفع تاری حرکت و یکپارچهسازی زمانی ویدیویی (ردیابی پلاک در فریمهای متوالی) به کاهش این مشکلات کمک میکنند.
-
تنوع در طراحی پلاکها: کشورها قالب، فونت و طرح رنگی متفاوت دارند. مجموعه دادههای آموزشی منطقهای و معماریهای مدولار مدل اجازه میدهند سیستمهای ALPR بهراحتی بین پیکربندیهای مختلف منطقهای جابجا شوند.
-
محدودیتهای محاسباتی: دستگاههای لبهای در دروازههای پارکینگ یا ایستگاههای عوارض باید پردازش را بهصورت محلی با توان پردازشی محدود انجام دهند. کمحجمسازی مدل، هرس کردن و استفاده از سختافزارهای تخصصی (مانند NVIDIA Jetson یا Google Coral) امکان استنتاج مؤثر در دستگاه را فراهم میآورد.
پیادهسازیهای واقعی
چند راهحل صنعتی که توانایی بینایی ماشین در ALPR را نشان میدهند عبارتند از:
-
PatrolVision: سیستمی با شتابدهنده GPU که بر روی خودروهای نظارتی پیاده شده و با بهرهگیری از یک آشکارساز سفارشی مبتنی بر YOLO و تشخیص CRNN برای پلاکهای دوخطی سنگاپور طراحی شده است.
-
Viso.ai ANPR: پلتفرمی یکپارچه با فضای ابری که API های تشخیص پلاک در زمان واقعی، داشبورد تحلیلی و استقرار منعطف در دستگاههای لبه یا ابر را ارائه میدهد.
-
OpenALPR: کتابخانه متنباز که بهطور گسترده برای مدیریت پارکینگ و کنترل دسترسی استفاده میشود و از بکاند C++ و رابطهای پایتون برای نمونهسازی سریع پشتیبانی میکند.
کاربردها در صنایع مختلف
انعطافپذیری فناوری ALPR کاربردهای بسیاری را ممکن ساخته است:
-
جمعآوری عوارض و مدیریت ترافیک: با کاهش ترافیک در ایستگاههای عوارض خودکار و امکان پایش سرعت خودروها، نقض قوانین و مدیریت بلادرنگ حوادث کمک میکند.
-
کنترل پارکینگ: راهحلهای هوشمند پارکینگ عملیات ورود/خروج را خودکار کرده، صورتحسابگذاری زمانبندیشده را تسهیل و امنیت را با تطبیق پلاکها با فهرست مجازها افزایش میدهند.
-
نیروی انتظامی: سازمانهای پلیس از ALPR برای شناسایی خودروهای سرقتی، هشدارهای کودک ربایی و پایش فهرستهای داغ استفاده میکنند و هزاران پلاک را در ساعت اسکن میکنند تا امنیت عمومی را بهبود بخشند.
-
مدیریت دسترسی: کمپهای شرکتی، مجتمعهای مسکونی و مراکز لجستیکی از ALPR برای اعطای دسترسی تنها به خودروهای از پیش تأییدشده بهره میبرند و عملیات را تسهیل و امنیت را تقویت میکنند.
ملاحظات حریم خصوصی و اخلاقی
با گسترش سیستمهای ALPR، نگرانیها در مورد نظارت جمعی و حریم خصوصی افزایش یافته است. گزارشها نشان میدهند برخی نهادهای قانونگذار نه تنها پلاکها را ثبت میکنند بلکه تصاویر زمینهای—مانند علائم سیاسی و اقلام شخصی—را نیز ضبط میکنند که مسائل حقوقی و آزادیهای مدنی را به همراه دارد. در سال ۲۰۲۵، شورای شهر دنور قرارداد ALPR خود را به دلیل اعتراضات عمومی تمدید نکرد که ضرورت سیاستهای شفاف، محدودیتهای نگهداری داده و نظارت مستقل را برجسته کرد.
روندهای آینده بینایی ماشین در تشخیص پلاک
مرز بعدی در ALPR یکپارچگی بیشتر با ابتکارات شهر هوشمند و چارچوبهای اینترنت اشیاء (IoT) خواهد بود. معماریهای لبه-به-ابری پردازش را بهطور هوشمندانه توزیع میکنند و پاسخهای با تأخیر بسیار کم را برای کاربردهای حیاتی مانند پاسخ اضطراری و کنترل ترافیک پویا امکانپذیر میسازند. پیشرفت در یادگیری بدون ناظر و خودنظارتی وابستگی به مجموعه دادههای برچسبخورده بزرگ را کاهش خواهد داد و مدلهای مولد میتوانند دادههای آموزشی برای قالبهای نادر پلاک را افزایش دهند. در نهایت، فناوریهای حفاظت از حریم خصوصی—مانند ناشناسسازی در دستگاه و یادگیری فدراسیونشده—برای تعادل بین کارایی عملیاتی و حقوق فردی ضروری خواهند بود.
نتیجهگیری
بینایی ماشین، تشخیص خودکار پلاک خودرو را از چالشی در محیطهای کنترلشده به راهحلی بالغ و با عملکرد بالا که در سراسر جهان پیاده شده است، تبدیل کرده است. با بهرهگیری از یادگیری عمیق، پردازش لبه و تکنیکهای پیشپردازش مقاوم، سیستمهای ALPR معجزهای از دقت و سرعت را حتی در شرایط سخت ارائه میدهند. با گسترش روزافزون کاربردها—از عوارض و پارکینگ تا اعمال قانون—ذینفعان باید به موازات چالشهای فنی، ملاحظات اخلاقی و حقوقی را نیز مدنظر قرار دهند. با ادامه پژوهش، چارچوبهای قانونی و نوآوریهای فناوری، آینده ALPR با پیادهسازیهای هوشمندتر، امنتر و اخلاقیتر تعریف خواهد شد که حرکت شهری و امنیت عمومی را ارتقا میبخشند.





