چرا پردازش تصویر اولیه نامناسب در دوربینهای متفرقه باعث «شارپشدن مصنوعی» و افت دقت پلاکخوانی میشود؟

در پروژههای پلاکخوانی، بسیاری از کارفرماها و حتی بعضی مجریان فنی در نگاه اول به یک معیار ساده توجه میکنند: «تصویر چقدر شارپ و واضح به نظر میرسد؟» اگر تصویر دوربین روی مانیتور لبههای تیز،…
در پروژههای پلاکخوانی، بسیاری از کارفرماها و حتی بعضی مجریان فنی در نگاه اول به یک معیار ساده توجه میکنند: «تصویر چقدر شارپ و واضح به نظر میرسد؟» اگر تصویر دوربین روی مانیتور لبههای تیز، کنتراست بالا و جزئیات ظاهراً زیاد داشته باشد، معمولاً تصور میشود که این دوربین برای پلاکخوانی مناسبتر است. اما در عمل، مخصوصاً در سیستمهای پلاکخوان حرفهای یا ANPR/LPR، این برداشت همیشه درست نیست. اتفاقاً یکی از مشکلات رایج در برندهای متفرقه و دوربینهای غیرصنعتی این است که پردازش تصویر اولیه آنها بیش از حد تهاجمی است و تصویر را به شکل مصنوعی شارپ میکند. این شارپشدن مصنوعی شاید برای چشم انسان جذاب باشد، اما برای الگوریتم پلاکخوانی میتواند مخرب باشد.
موضوع اصلی این مقاله همین است: نامناسب بودن پردازش تصویر اولیه در برندهای متفرقه موجب شارپشدن مصنوعی تصاویر در پلاکخوانی میشود و این شارپشدن میتواند دقت تشخیص پلاک را کاهش دهد.
در ادامه به زبان فنی اما قابلفهم توضیح میدهیم که چرا «تصویر شارپتر» همیشه به معنی «پلاکخوانی بهتر» نیست، پردازش داخلی دوربینها چه نقشی در خرابکردن داده خام دارد، چرا برندهای صنعتی مثل Basler معمولاً کنترلپذیرتر و مناسبتر هستند، و هنگام انتخاب دوربین برای پلاکخوانی باید به چه نکاتی توجه کرد.
۱. پلاکخوانی به تصویر زیبا نیاز ندارد؛ به تصویر وفادار نیاز دارد
در کاربردهای نظارتی عمومی، تصویر خوب یعنی تصویری که برای انسان خوشایند باشد: رنگهای زنده، کنتراست بالا، لبههای تیز، نویز کمتر و جزئیات ظاهری بیشتر. اما در پلاکخوانی، هدف اصلی زیباشدن تصویر نیست. هدف این است که نرمافزار بتواند کاراکترهای پلاک را با بیشترین اطمینان تشخیص دهد.
الگوریتم پلاکخوانی، چه مبتنی بر روشهای کلاسیک پردازش تصویر باشد و چه مبتنی بر شبکههای عصبی و یادگیری عمیق، به چند ویژگی مهم نیاز دارد:
- مرز واقعی بین کاراکتر و پسزمینه پلاک حفظ شده باشد.
- ضخامت خطوط کاراکترها تغییر غیرواقعی نکرده باشد.
- نویز به شکل لبه یا نقطههای کاذب تقویت نشده باشد.
- نواحی روشن پلاک، مخصوصاً پلاکهای بازتابنده، اشباع نشده باشند.
- پردازش تصویر در فریمهای مختلف پایدار و قابلپیشبینی باشد.
- تصویر بیش از حد فشرده، شارپ، صاف یا دستکاری نشده باشد.
بنابراین برای پلاکخوانی، تصویر ایدهآل لزوماً تصویری نیست که روی مانیتور «قشنگتر» دیده شود؛ بلکه تصویری است که اطلاعات واقعی صحنه را با کمترین دستکاری غیرقابلبازگشت منتقل کند.
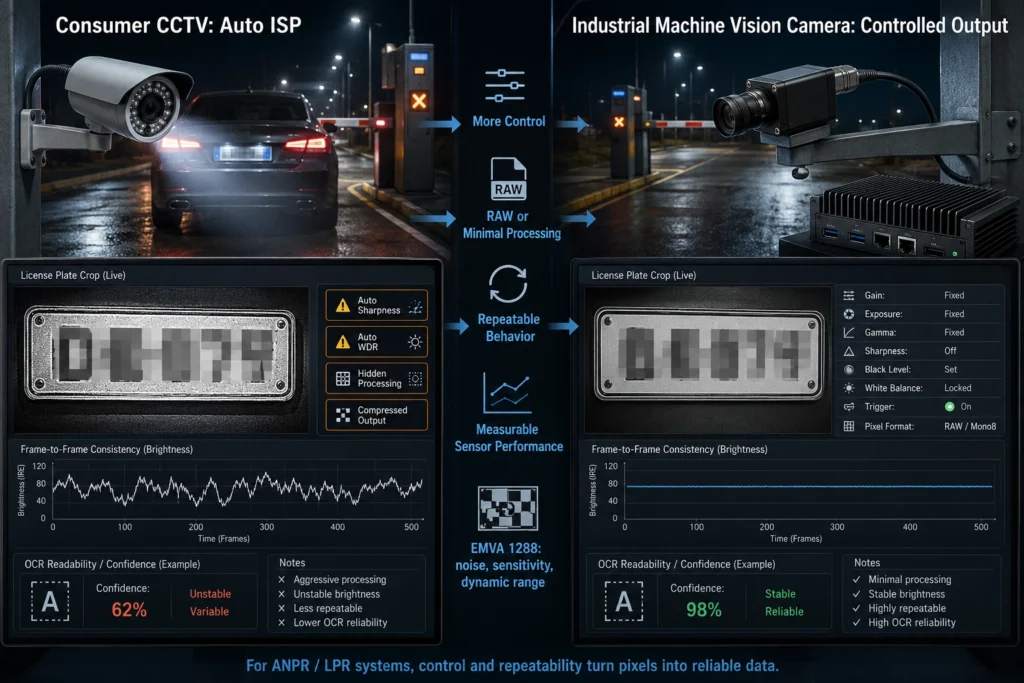
اینجا تفاوت بزرگ دوربین صنعتی و دوربین متفرقه مشخص میشود. دوربین صنعتی معمولاً مثل یک ابزار اندازهگیری رفتار میکند؛ یعنی سعی میکند داده واقعی سنسور را تا جای ممکن بدون دستکاری در اختیار نرمافزار قرار دهد. اما بسیاری از دوربینهای متفرقه، مخصوصاً دوربینهای ارزانقیمت نظارتی یا IP Cameraهای عمومی، طوری طراحی شدهاند که تصویرشان برای مشاهده انسانی جذابتر باشد. به همین دلیل در داخل خود دوربین پردازشهایی مثل شارپسازی، کاهش نویز، افزایش کنتراست، WDR، گاما، اشباع رنگ و فشردهسازی شدید اعمال میشود.
مشکل اینجاست که این پردازشها قبل از رسیدن تصویر به نرمافزار پلاکخوان اتفاق میافتند و معمولاً برگشتپذیر نیستند.

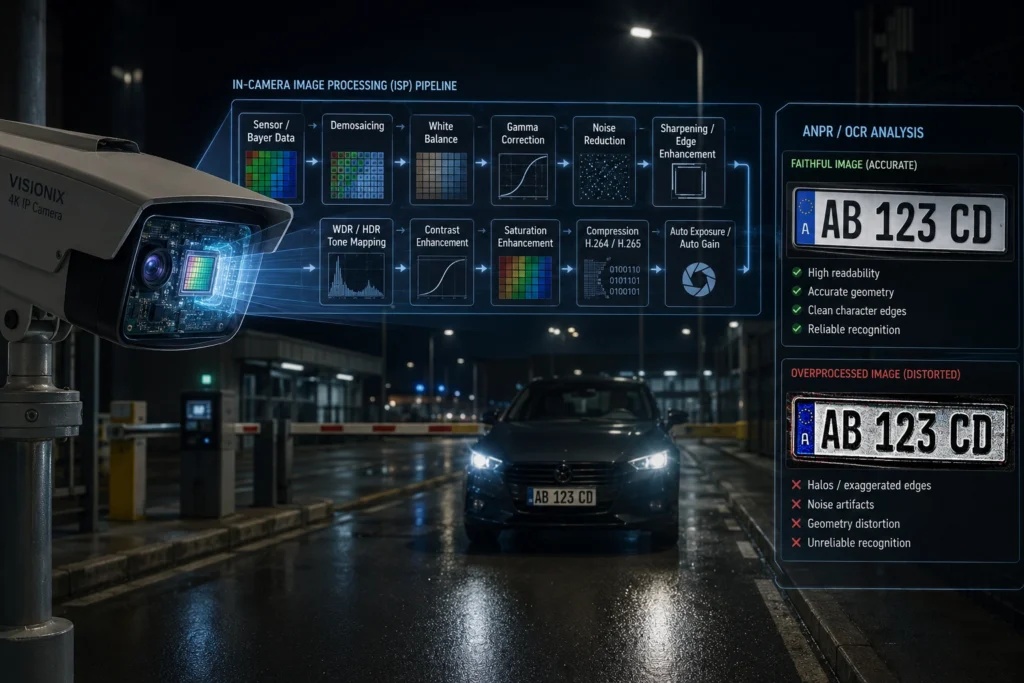
۲. پردازش تصویر اولیه در دوربین چیست؟
هر دوربین دیجیتال، بعد از دریافت نور توسط سنسور، تصویر را از چند مرحله عبور میدهد. به این زنجیره معمولاً Image Signal Processing یا ISP گفته میشود. در دوربینهای رنگی، داده اولیه سنسور معمولاً به شکل خام یا Bayer است. سپس پردازشهایی روی آن انجام میشود تا تصویر نهایی قابل نمایش یا ارسال باشد.
پردازشهای رایج داخل دوربین شامل موارد زیر است:
- Demosaicing یا تبدیل داده خام سنسور به تصویر رنگی
- White Balance یا تراز سفیدی
- Gamma Correction یا اصلاح گاما
- Noise Reduction یا کاهش نویز
- Sharpening / Edge Enhancement یا شارپسازی و تقویت لبه
- WDR / HDR Tone Mapping یا فشردهسازی دامنه دینامیکی
- Contrast Enhancement یا افزایش کنتراست
- Saturation Enhancement یا افزایش اشباع رنگ
- Compression مثل H.264، H.265 یا MJPEG
- Auto Exposure / Auto Gain یا تنظیم خودکار نوردهی و بهره
در نگاه اول این پردازشها مفید به نظر میرسند. مثلاً کاهش نویز میتواند تصویر را تمیزتر کند و شارپسازی میتواند لبهها را واضحتر نشان دهد. اما در سیستمهای ماشینبینایی، هر پردازشی که کنترلشده، مستند و قابل غیرفعالسازی نباشد، میتواند خطرناک باشد.
در پلاکخوانی، مهمترین مسئله این است که مرز کاراکترها دقیق و واقعی باقی بماند. اگر دوربین قبل از نرمافزار پلاکخوان، لبهها را به شکل مصنوعی تقویت کند، نرمافزار دیگر با تصویر واقعی مواجه نیست؛ بلکه با تصویری مواجه است که در آن بخشی از اطلاعات تغییر کرده، بخشی حذف شده و بخشی هم به شکل کاذب اضافه شده است.
۳. شارپسازی دقیقاً چه کاری با تصویر میکند؟
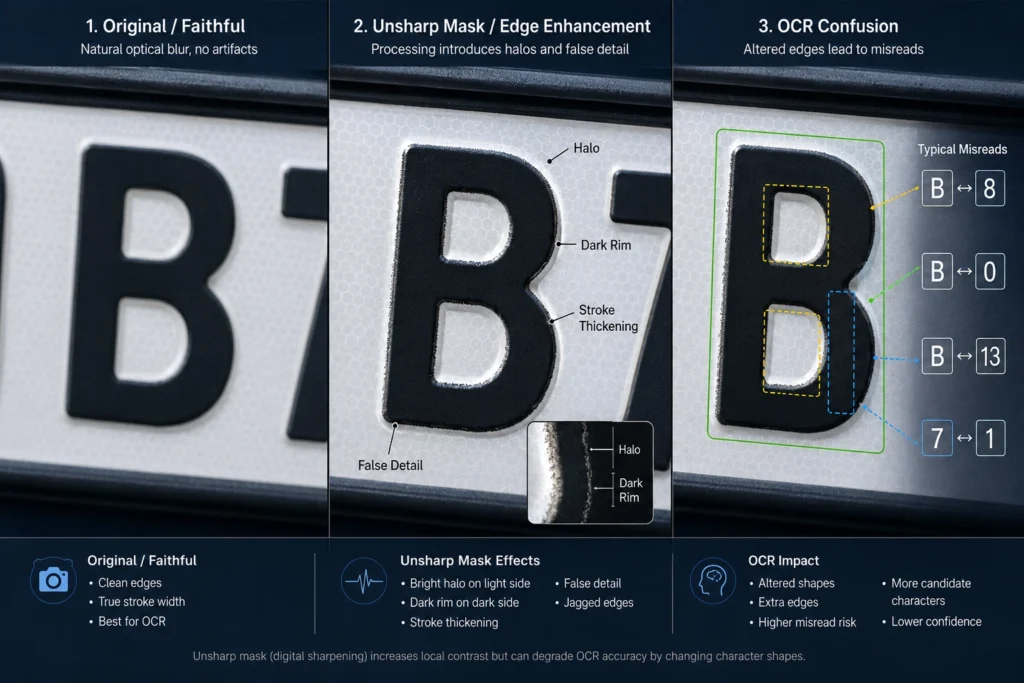
برای فهم مشکل باید بدانیم شارپسازی دیجیتال چگونه کار میکند. رایجترین روش شارپسازی، روشی شبیه به Unsharp Mask است. در این روش، دوربین نسخهای تارشده از تصویر را از تصویر اصلی کم میکند تا لبهها برجستهتر شوند. نتیجه این است که در اطراف لبههای پرکنتراست، اختلاف روشنایی بیشتر به نظر میرسد.
به زبان ساده، اگر یک کاراکتر مشکی روی زمینه سفید پلاک داشته باشیم، شارپسازی ممکن است این اتفاقات را ایجاد کند:
- در سمت سفید کنار لبه، یک نوار سفیدتر از حالت واقعی ایجاد شود.
- در سمت مشکی لبه، یک نوار تیرهتر از حالت واقعی ایجاد شود.
- لبه کاراکتر تیزتر اما غیرواقعی شود.
- دور کاراکتر هاله یا Halo شکل بگیرد.
- ضخامت ظاهری کاراکتر تغییر کند.
- فاصله بین دو کاراکتر کمتر یا بیشتر از حالت واقعی دیده شود.
- نویزهای ریز سطح پلاک به شکل نقطهها و خطوط کاذب تقویت شوند.
این پدیده برای چشم انسان ممکن است حس «وضوح بیشتر» ایجاد کند، اما برای OCR و تشخیص کاراکتر میتواند باعث خطا شود. مثلاً:
- عدد ۱ ممکن است ضخیمتر دیده شود و با ۷ یا بخشی از کاراکتر دیگر اشتباه شود.
- عدد ۸ ممکن است به دلیل هالههای داخلی شبیه B یا ۰ خرابشده دیده شود.
- کاراکترهای نزدیک به هم ممکن است به هم بچسبند.
- نقاط یا پیچهای پلاک ممکن است به عنوان بخشی از کاراکتر تشخیص داده شوند.
- مرز واقعی پلاک و پسزمینه دچار خطا شود.
به همین دلیل است که در پلاکخوانی حرفهای، «شارپبودن ظاهری» معیار اصلی نیست. معیار مهمتر این است که تصویر دارای وضوح واقعی اپتیکی باشد، نه وضوح مصنوعی دیجیتال.
۴. تفاوت وضوح واقعی و شارپسازی مصنوعی
یکی از اشتباهات رایج این است که شارپسازی دیجیتال با فوکوس خوب یا لنز باکیفیت اشتباه گرفته میشود. این دو کاملاً متفاوتاند.
وضوح واقعی از ترکیب درست چند عامل به دست میآید:
- سنسور مناسب
- لنز باکیفیت
- فوکوس دقیق
- نوردهی درست
- سرعت شاتر کافی
- فاصله و زاویه نصب مناسب
- تعداد پیکسل کافی روی پلاک
اما شارپسازی مصنوعی فقط یک پردازش نرمافزاری است که پس از ثبت تصویر انجام میشود. اگر تصویر واقعاً تار باشد، شارپسازی نمیتواند جزئیات از دسترفته را برگرداند. فقط لبههای موجود را تهاجمیتر میکند و گاهی نویز را به شکل جزئیات جعلی نمایش میدهد.
برای پلاکخوانی، اگر تصویر به دلیل فوکوس بد، لرزش، حرکت خودرو یا لنز نامناسب تار شده باشد، راهحل واقعی این است که مشکل تصویربرداری برطرف شود، نه اینکه شارپسازی داخلی دوربین زیاد شود. شارپسازی زیاد فقط ظاهر تصویر را فریبندهتر میکند؛ اما الگوریتم پلاکخوان با دادهای مخدوش روبهرو خواهد شد.
۵. چرا برندهای متفرقه بیشتر دچار این مشکل هستند؟
همه برندهای غیرصنعتی الزاماً بد نیستند و همه برندهای معروف هم همیشه تنظیمات ایدهآل ندارند. اما تجربه فنی نشان میدهد که بسیاری از برندهای متفرقه، بهخصوص دوربینهایی که برای کاربرد عمومی نظارتی ساخته شدهاند، چند مشکل مشترک دارند:
۵.۱. پردازش داخلی غیرشفاف
در بسیاری از دوربینهای متفرقه مشخص نیست دقیقاً چه پردازشهایی روی تصویر اعمال میشود. ممکن است منوی دوربین گزینهای به نام Sharpness داشته باشد، اما حتی اگر آن را روی صفر قرار دهید، بخشی از Edge Enhancement همچنان در سطح ISP فعال بماند. در بعضی مدلها نیز تنظیمات «Auto» واقعاً خاموش نمیشوند و دوربین بسته به صحنه، پردازش را تغییر میدهد.
برای پلاکخوانی، این موضوع بسیار مشکلساز است؛ چون نرمافزار باید با شرایط پایدار کار کند. اگر دوربین در هر فریم بسته به نور، بافت، حرکت یا کنتراست صحنه مقدار شارپسازی را تغییر دهد، ظاهر کاراکترها نیز از فریمی به فریم دیگر تغییر میکند.
۵.۲. تنظیمات پیشفرض برای چشم انسان
دوربینهای متفرقه معمولاً برای بازار عمومی طراحی میشوند. کاربر عمومی وقتی تصویر را میبیند، از تصویر پرکنتراست و شارپ خوشش میآید. بنابراین کارخانه، تنظیمات پیشفرض را طوری قرار میدهد که تصویر «زندهتر» و «واضحتر» دیده شود. این یعنی:
- شارپسازی بالا
- کنتراست زیاد
- رنگهای اغراقشده
- کاهش نویز سنگین
- WDR تهاجمی
- فشردهسازی زیاد برای کاهش پهنای باند
اما این ویژگیها برای پلاکخوانی لزوماً خوب نیستند. پلاکخوانی یک کاربرد ماشینبینایی است، نه صرفاً مشاهده انسانی.
۵.۳. استفاده از ISPهای عمومی و ارزان
بسیاری از دوربینهای ارزان از پردازندههای تصویر عمومی استفاده میکنند. این ISPها برای کاربردهای عمومی مثل دوربین مداربسته، دوربین خودرو، دوربین خانگی یا استریم ویدئو بهینه شدهاند. در چنین پردازندههایی، هدف اصلی تولید تصویر قابلقبول با هزینه کم است، نه حفظ داده دقیق برای OCR.
به همین دلیل الگوریتمهای داخلی آنها ممکن است به صورت خودکار این کارها را انجام دهند:
- لبهها را بیش از حد تقویت کنند.
- نویز را صاف کنند و بعد برای جبران، تصویر را شارپ کنند.
- بخشهای روشن پلاک را با WDR فشرده کنند.
- جزئیات ریز کاراکترها را قربانی کاهش نویز کنند.
- در شب، به دلیل Gain بالا، نویز را به همراه شارپسازی تشدید کنند.
۵.۴. نبود خروجی خام یا Raw
در دوربینهای صنعتی معمولاً امکان دریافت تصویر خام یا حداقل تصویر با پردازش حداقلی وجود دارد. اما بسیاری از دوربینهای متفرقه فقط خروجی فشردهشده و پردازششده ارائه میدهند. وقتی تصویر یک بار داخل دوربین شارپ، فشرده و دستکاری شد، نرمافزار پلاکخوان نمیتواند به داده اولیه سنسور دسترسی داشته باشد.
این شبیه این است که به جای دریافت فایل اصلی عکس، فقط یک عکس ادیتشده، فشردهشده و فیلترشده داشته باشیم و بخواهیم از روی آن اندازهگیری دقیق انجام دهیم.

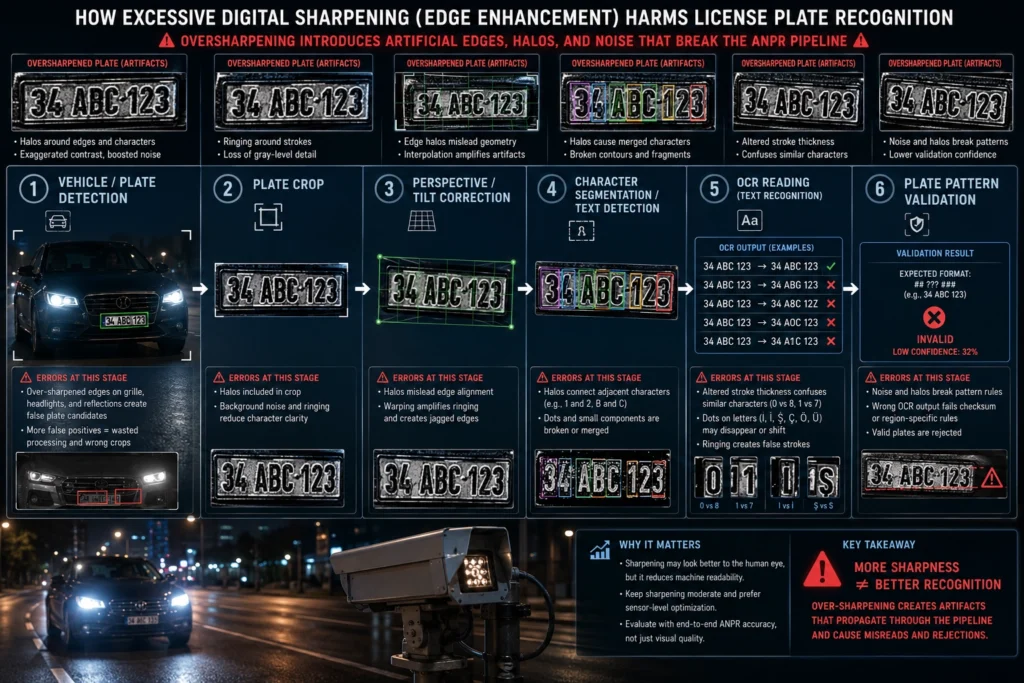
۶. اثر شارپسازی مصنوعی روی مراحل مختلف پلاکخوانی
سیستم پلاکخوان معمولاً چند مرحله اصلی دارد:
- تشخیص خودرو یا ناحیه پلاک
- برش پلاک
- اصلاح زاویه و پرسپکتیو
- جداسازی کاراکترها یا تشخیص مستقیم متن
- OCR یا خواندن کاراکترها
- اعتبارسنجی بر اساس الگوی پلاک
شارپسازی نامناسب میتواند در همه این مراحل مشکل ایجاد کند.
۶.۱. اختلال در تشخیص ناحیه پلاک
بسیاری از الگوریتمها برای پیدا کردن پلاک از تفاوت بافت، کنتراست، لبههای افقی/عمودی و شکل مستطیلی پلاک استفاده میکنند. اگر دوربین همه لبههای صحنه را تقویت کند، ممکن است اجزای دیگری مثل جلوپنجره، چراغ، نوشتههای روی خودرو، سپر یا سایهها هم شبیه ناحیه پلاک دیده شوند.
در نتیجه سیستم ممکن است:
- پلاک را دیرتر پیدا کند.
- ناحیه اشتباه را به عنوان پلاک انتخاب کند.
- چند کاندیدای غلط تولید کند.
- در تصاویر شب یا نور شدید دچار خطای بیشتر شود.
۶.۲. خرابشدن مرز کاراکترها
اگر پلاک درست پیدا شود، مرحله بعدی خواندن متن است. در روشهای کلاسیک، جداسازی کاراکترها اهمیت زیادی دارد. هالههای ناشی از شارپسازی میتوانند باعث چسبیدن کاراکترها شوند. مثلاً اگر فاصله بین دو رقم کم باشد، هاله سفید و سیاه اطراف آنها میتواند باعث شود نرمافزار آنها را یک کاراکتر واحد یا یک لکه متصل ببیند.
حتی در روشهای جدید مبتنی بر یادگیری عمیق که الزاماً کاراکترها را جدا نمیکنند، شکل غیرواقعی لبهها باعث تغییر توزیع داده میشود. شبکه عصبی روی الگوهایی آموزش دیده که ضخامت و بافت مشخصی دارند. وقتی دوربین متفرقه با پردازش داخلی خود هاله ایجاد میکند، داده ورودی با داده آموزشی متفاوت میشود و احتمال خطا افزایش مییابد.
۶.۳. افزایش نویز کاذب
پلاکها، بهویژه پلاکهای بازتابنده، در نور مادون قرمز یا نور مستقیم میتوانند بافتهای ریز، لکهها و بازتابهای نقطهای ایجاد کنند. شارپسازی این نویزها را تقویت میکند. در نتیجه، نویزهای سطح پلاک ممکن است شبیه نقطه، خط یا بخشی از کاراکتر دیده شوند.
این مشکل در شرایط زیر شدیدتر است:
- نور کم و Gain بالا
- استفاده از IR قوی
- پلاک کثیف یا خشدار
- باران و قطرات آب
- انعکاس چراغ خودروها
- زاویه نصب نامناسب
- فشردهسازی شدید ویدئو
۶.۴. تغییر ضخامت کاراکترها
OCR به ضخامت، نسبت ابعاد و فرم کاراکتر حساس است. اگر شارپسازی باعث ضخیمشدن یا نازکشدن ظاهری خطوط شود، تشخیص اشتباه رخ میدهد. برای مثال در برخی پلاکها، تفاوت بین کاراکترهایی مثل ۰ و ۸، ۱ و ۷، ۲ و Z، ۵ و S، یا ب و پ، ممکن است با تغییرات کوچک در شکل لبهها تحت تأثیر قرار گیرد.
در پلاک فارسی نیز مسئله حساستر است؛ چون بعضی حروف و اعداد دارای نقطه، انحنا یا شکلهای نزدیک به هم هستند. شارپسازی زیاد میتواند نقطهها را بزرگتر، کوچکتر یا حتی با نویزهای دیگر ادغام کند.
۷. چرا Basler و دوربینهای صنعتی معمولاً انتخاب مطمئنتری هستند؟
در اطلاعاتی که ارائه کردهاید به Basler اشاره شده بود. اصل این مقایسه از نظر فنی قابلقبول است: برندهایی مانند Basler، FLIR/Teledyne، IDS، Allied Vision و سایر سازندگان دوربینهای صنعتی، معمولاً برای ماشینبینایی طراحی شدهاند، نه صرفاً نظارت تصویری عمومی.
تفاوت مهم این دوربینها در چند نکته است:
۷.۱. کنترلپذیری بیشتر
دوربین صنعتی معمولاً اجازه میدهد پارامترهایی مثل Gain، Exposure، Gamma، Sharpness، Black Level، White Balance، Trigger، Pixel Format و خروجی خام کنترل شوند. این کنترلپذیری برای پلاکخوانی حیاتی است.
در پروژه پلاکخوانی، ما نمیخواهیم دوربین هر لحظه خودش تصمیم بگیرد تصویر را چگونه زیباتر کند. ما میخواهیم شرایط تصویربرداری پایدار باشد تا نرمافزار بتواند با اطمینان تصمیم بگیرد.
۷.۲. خروجی خام یا کمپردازششده
بسیاری از دوربینهای صنعتی امکان ارائه خروجی Raw یا خروجی با پردازش حداقلی دارند. این یعنی نرمافزار پلاکخوان یا سیستم پردازشی بیرونی میتواند خودش تصمیم بگیرد چه مقدار نویزگیری، کنتراست، نرمالسازی یا شارپسازی لازم است.
این رویکرد بسیار بهتر از این است که دوربین بهصورت ناشناخته و غیرقابلکنترل تصویر را پردازش کند.
۷.۳. رفتار پایدار و قابلاندازهگیری
در ماشینبینایی، تکرارپذیری بسیار مهم است. اگر امروز دوربین در یک شرایط نوری تصویری تولید کند و فردا در شرایط مشابه تصویری متفاوت، تنظیم و عیبیابی سیستم دشوار میشود. دوربینهای صنعتی معمولاً مشخصات فنی دقیقتر و رفتار پایدارتری دارند.
استانداردهایی مثل EMVA 1288 نیز برای توصیف و اندازهگیری عملکرد سنسور و دوربین در حوزه ماشینبینایی استفاده میشوند. چنین استانداردهایی روی مشخصاتی مثل نویز، حساسیت، بهره، دامنه دینامیکی و رفتار سنسور تمرکز دارند. در مقابل، بسیاری از دوربینهای متفرقه فاقد اطلاعات دقیق و قابلاعتماد درباره عملکرد واقعی تصویر هستند.
۸. نقش فشردهسازی در کنار شارپسازی
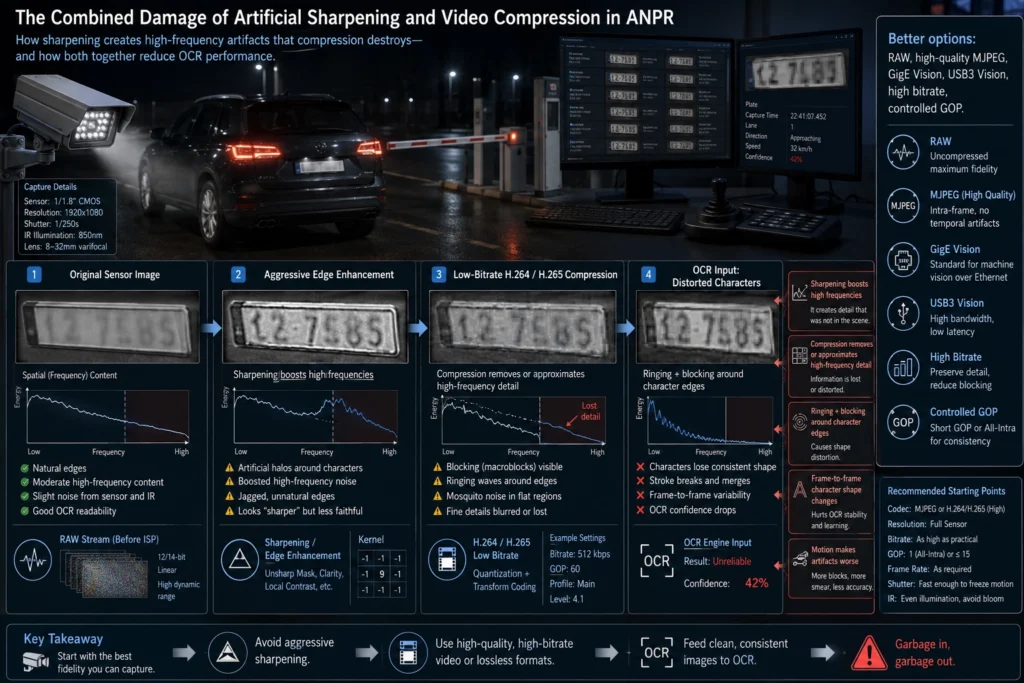
یکی دیگر از مشکلات مهم در دوربینهای متفرقه، فشردهسازی ویدئو است. اگر تصویر با H.264 یا H.265 و بیتریت پایین ارسال شود، اطراف لبهها بلوک، موج، ringing و artifact ایجاد میشود. حالا اگر قبل از فشردهسازی، شارپسازی شدید هم اعمال شده باشد، مشکل دوبرابر میشود.
شارپسازی باعث افزایش فرکانسهای بالا در تصویر میشود. فشردهسازی ویدئویی با فرکانسهای بالا مشکل دارد و برای کاهش حجم، بخشی از آنها را حذف یا تقریب میکند. نتیجه ممکن است این باشد:
- اطراف کاراکترها موج ایجاد شود.
- لبهها دندانهدار شوند.
- جزئیات ریز پلاک از بین برود.
- در فریمهای مختلف شکل کاراکترها تغییر کند.
- در حرکت خودرو، artifactهای فشردهسازی شدیدتر شوند.
به همین دلیل در پروژههای پلاکخوانی حرفهای، بهتر است تا حد امکان از تصویر خام، MJPEG با کیفیت بالا، GigE Vision، USB3 Vision یا فرمتهای کمفشرده استفاده شود. اگر ناچار به استفاده از استریم H.264/H.265 هستیم، باید بیتریت کافی، GOP مناسب و تنظیمات فشردهسازی کنترلشده داشته باشیم.
۹. شارپسازی با WDR و نویزگیری چه ترکیبی میسازد؟
مشکل دوربینهای متفرقه فقط شارپسازی نیست؛ بلکه ترکیب چند پردازش خودکار است. یک زنجیره رایج در دوربینهای نظارتی اینگونه است:
- تصویر در نور کم نویزی میشود.
- دوربین برای کاهش نویز، فیلتر نرمکننده اعمال میکند.
- فیلتر نویزگیری، جزئیات ریز و لبههای ظریف را هم نرم میکند.
- دوربین برای جبران، شارپسازی میکند.
- سپس برای کنترل روشنایی، WDR یا Tone Mapping اعمال میشود.
- در نهایت تصویر فشرده میشود.
این زنجیره شاید برای دیدن صحنه توسط انسان قابلقبول باشد، اما برای پلاکخوانی ایدهآل نیست. نویزگیری میتواند خطوط ظریف را حذف کند، شارپسازی میتواند هاله بسازد، WDR میتواند نسبت روشنایی واقعی را تغییر دهد و فشردهسازی میتواند artifact اضافه کند.
بهخصوص WDR در پلاکخوانی باید با احتیاط استفاده شود. پلاکها معمولاً بازتابندهاند و در شب با نور IR یا نور سفید روشن میشوند. اگر WDR یا HDR tone mapping به شکل تهاجمی روشنایی پلاک را فشرده کند، ممکن است کنتراست کاراکتر و زمینه کاهش یابد یا بخشهایی از پلاک حالت غیرطبیعی پیدا کند.

۱۰. چرا پلاکهای بازتابنده نسبت به پردازش اشتباه حساسترند؟
بسیاری از پلاکها دارای پوشش بازتابنده هستند تا در شب بهتر دیده شوند. این ویژگی برای راننده و پلیس مفید است، اما برای دوربین میتواند چالش ایجاد کند. وقتی نور IR یا نور سفید از نزدیکی دوربین به پلاک میتابد، پلاک مقدار زیادی از نور را به سمت دوربین برمیگرداند. بنابراین زمینه پلاک ممکن است بسیار روشن شود.
اگر نوردهی درست تنظیم نشده باشد، زمینه پلاک اشباع میشود. اگر اشباع رخ دهد، اطلاعات جزئیات از بین میرود و هیچ الگوریتمی نمیتواند آن را کامل بازسازی کند. حالا اگر دوربین روی این تصویر اشباعشده شارپسازی کند، اطراف کاراکترها هالههای شدید ایجاد میشود.
در پلاکهای کثیف، خشدار یا مرطوب نیز شارپسازی باعث برجستهشدن لکهها و بازتابهای ناخواسته میشود. در نتیجه نرمافزار ممکن است بخشی از آلودگی یا خش را به عنوان کاراکتر ببیند.
۱۱. معیار درست برای ارزیابی تصویر پلاکخوان چیست؟
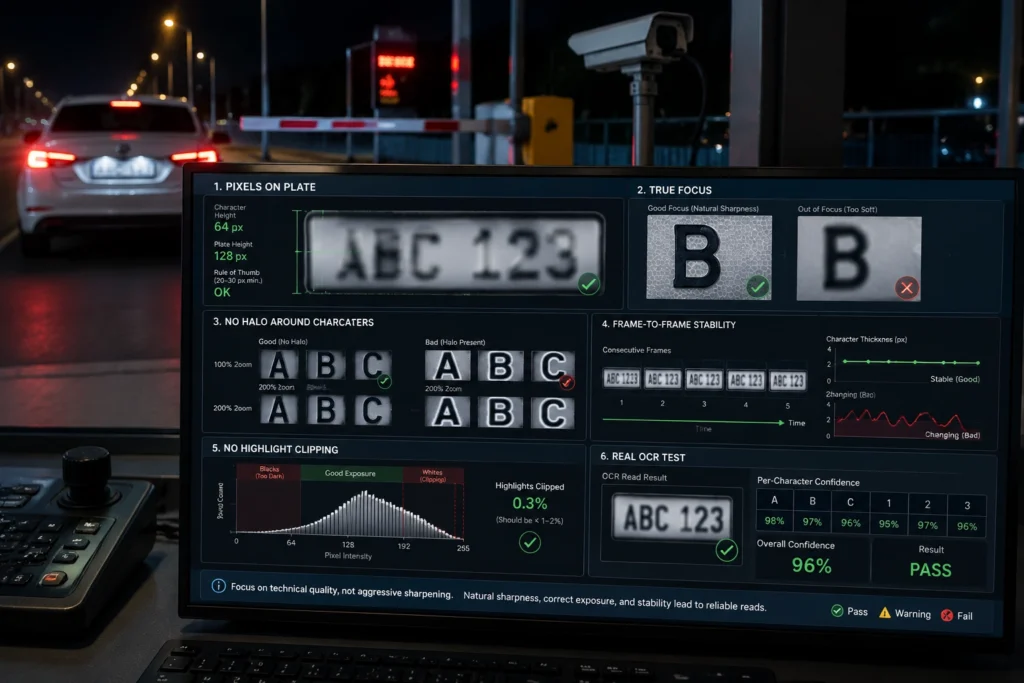
برای ارزیابی دوربین پلاکخوان نباید فقط به نگاه ظاهری بسنده کرد. بهتر است چند معیار فنی بررسی شود:
۱۱.۱. تعداد پیکسل روی پلاک
باید بررسی شود ارتفاع کاراکترها چند پیکسل است. اگر کاراکترها خیلی کوچک باشند، هیچ میزان شارپسازی مشکل را حل نمیکند. معمولاً بسته به الگوریتم، فاصله، نوع پلاک و شرایط نصب، باید تعداد پیکسل کافی روی ارتفاع کاراکتر وجود داشته باشد.
۱۱.۲. فوکوس واقعی
فوکوس باید با خاموشبودن شارپسازی یا حداقل شارپسازی بررسی شود. اگر تصویر بدون شارپسازی تار است، مشکل اپتیکی یا تنظیم فوکوس وجود دارد.
۱۱.۳. نبود هاله اطراف کاراکترها
در بزرگنمایی ۱۰۰٪ یا ۲۰۰٪ باید اطراف حروف و اعداد بررسی شود. اگر دور کاراکترها نوار سفید یا سیاه غیرطبیعی دیده میشود، شارپسازی زیاد است.
۱۱.۴. پایداری فریمها
چند فریم پشتسرهم از عبور خودرو باید بررسی شود. اگر ضخامت یا شکل کاراکترها در فریمها تغییر میکند، ممکن است پردازش خودکار دوربین فعال باشد.
۱۱.۵. نبود اشباع
بخشهای روشن پلاک نباید کاملاً سفید و بدون جزئیات شوند. Histogram و مقدار پیکسلها میتواند نشان دهد آیا clipping رخ داده یا نه.
۱۱.۶. تست واقعی OCR
مهمترین معیار، نرخ تشخیص واقعی پلاک در شرایط عملیاتی است. ممکن است تصویری برای انسان عالی به نظر برسد اما OCR روی آن خطا بدهد. بنابراین باید ارزیابی با نرمافزار پلاکخوان واقعی انجام شود، نه فقط با مشاهده تصویر.
۱۲. تنظیمات پیشنهادی برای کاهش اثر شارپسازی مصنوعی
اگر مجبور هستید از دوربین غیرصنعتی یا متفرقه استفاده کنید، بهتر است این تنظیمات را بررسی کنید:
- Sharpness را روی کمترین مقدار قرار دهید.
- Noise Reduction را بیش از حد زیاد نکنید.
- WDR را فقط در صورت نیاز و با تست OCR فعال کنید.
- Auto Exposure را محدود یا قفل کنید.
- Auto Gain را کنترل کنید تا نویز زیاد نشود.
- Bitrate و کیفیت فشردهسازی را افزایش دهید.
- در صورت امکان از MJPEG یا تصویر کمفشرده استفاده کنید.
- Gamma و Contrast را به حالت طبیعی نزدیک نگه دارید.
- نور IR یا نور سفید را درست تنظیم کنید تا پلاک نسوزد.
- فوکوس را در شرایط واقعی عبور خودرو تنظیم کنید، نه فقط در حالت توقف.
اگر دوربین اجازه غیرفعالسازی واقعی شارپسازی و پردازش داخلی را نمیدهد، برای پروژههای حساس پلاکخوانی انتخاب مناسبی نیست.
۱۳. آیا همیشه باید شارپسازی را صفر کرد؟
در حالت ایدهآل، بهتر است شارپسازی داخل دوربین خاموش باشد و هر نوع بهبود تصویر در نرمافزار بیرونی، به شکل کنترلشده و قابلتنظیم انجام شود. اما در بعضی پروژههای ساده، مقدار بسیار کمی شارپسازی ممکن است ظاهراً کمک کند، بهخصوص وقتی کیفیت لنز متوسط است یا تصویر کمی نرم است.
با این حال باید به چند نکته توجه کرد:
- شارپسازی نباید هاله ایجاد کند.
- نباید باعث چسبیدن کاراکترها شود.
- نباید نویز سطح پلاک را برجسته کند.
- باید در همه شرایط نوری پایدار باشد.
- باید با OCR واقعی تست شود.
- بهتر است در نرمافزار انجام شود، نه داخل دوربین.
پس پاسخ دقیق این است: شارپسازی کنترلشده و ملایم ممکن است در برخی شرایط مفید باشد، اما شارپسازی خودکار، شدید، داخلی و غیرقابلکنترل در دوربینهای متفرقه برای پلاکخوانی خطرناک است.
۱۴. اشتباه رایج: مقایسه تصویر روی مانیتور
یکی از رایجترین خطاها در انتخاب دوربین پلاکخوان این است که چند دوربین را کنار هم میگذارند و تصویر خروجی را روی مانیتور مقایسه میکنند. دوربینی که تصویر شارپتر، پررنگتر و پرکنتراستتری دارد، برنده اعلام میشود. اما این روش برای پلاکخوانی ناقص است.
باید تصویر را در سطح پیکسل بررسی کرد. گاهی دوربینی که تصویر نرمتر و طبیعیتری دارد، برای OCR بهتر است، چون لبهها واقعیتر و بدون هاله هستند. دوربین شارپتر ممکن است فقط به کمک فیلتر داخلی تصویر را جذاب کرده باشد.
مقایسه درست باید اینگونه باشد:
- هر دو دوربین با لنز و فاصله مشابه تست شوند.
- تنظیمات شارپسازی و نویزگیری کنترل شود.
- در روز، شب، باران، نور مستقیم و سرعتهای مختلف خودرو تست انجام شود.
- خروجی OCR و نرخ خطا اندازهگیری شود.
- تصاویر خام یا کمپردازششده بررسی شوند.
- نرخ خطای کاراکتری و نرخ خطای پلاک کامل محاسبه شود.
۱۵. تأثیر شارپسازی بر شبکههای عصبی پلاکخوان
امروزه بسیاری از سیستمهای پلاکخوان از مدلهای یادگیری عمیق استفاده میکنند. شاید تصور شود که شبکه عصبی میتواند با هر نوع تصویری کنار بیاید. تا حدی درست است؛ اما نه همیشه.
شبکه عصبی بر اساس دادههای آموزشی یاد میگیرد. اگر مدل با تصاویری آموزش دیده باشد که لبههای طبیعی دارند، اما در پروژه واقعی تصویر دوربین دارای شارپسازی شدید و هاله باشد، یک نوع اختلاف دامنه یا Domain Shift ایجاد میشود. یعنی داده واقعی با داده آموزشی فرق دارد. این اختلاف میتواند باعث کاهش اعتماد مدل و افزایش خطا شود.
البته میتوان مدل را با تصاویر همان دوربین و همان تنظیمات دوباره آموزش داد یا Fine-tune کرد. اما این راهحل همیشه عملی نیست، چون:
- تنظیمات دوربین متفرقه ممکن است خودکار تغییر کند.
- مدل دوربین یا Firmware عوض میشود.
- شرایط نور روز و شب متفاوت است.
- شارپسازی در صحنههای مختلف شدت متفاوتی دارد.
- جمعآوری دیتاست کافی هزینهبر است.
بنابراین بهتر است از ابتدا تصویری پایدار، واقعی و کمپردازششده وارد سیستم شود.
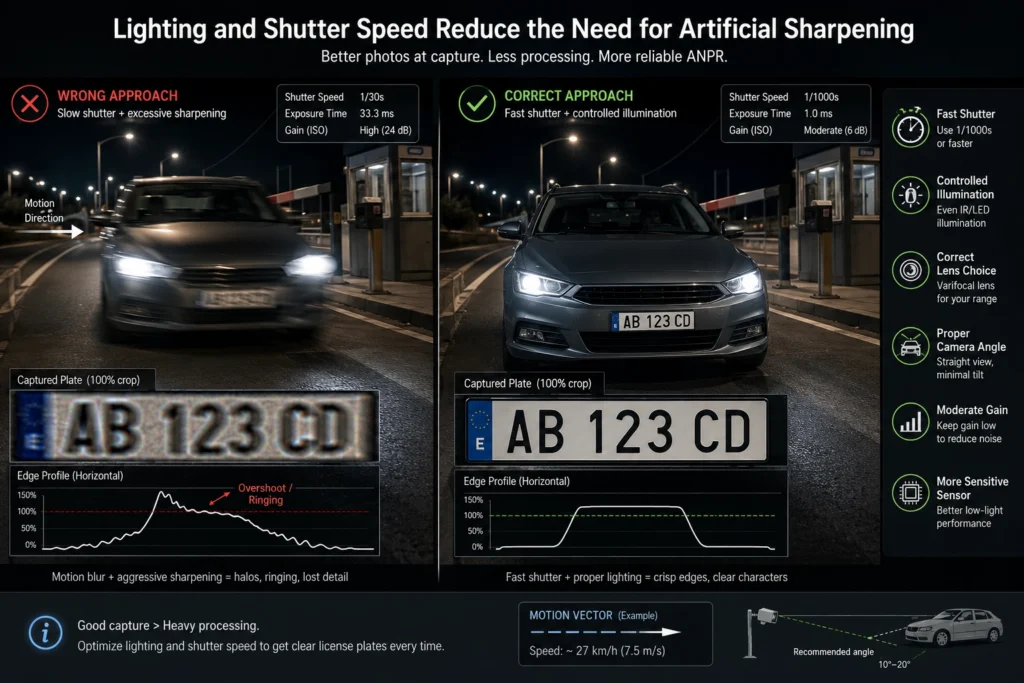
۱۶. نقش نورپردازی و شاتر در کاهش نیاز به شارپسازی
اگر سیستم تصویربرداری درست طراحی شود، نیاز به شارپسازی کاهش مییابد. دو عامل بسیار مهم در پلاکخوانی، نور و سرعت شاتر هستند.
خودرو در حال حرکت است. اگر شاتر کند باشد، تصویر پلاک دچار Motion Blur میشود. بعضی افراد برای جبران این تاری، شارپسازی را زیاد میکنند. اما این کار راهحل واقعی نیست. تاری حرکتی باعث از دست رفتن اطلاعات در راستای حرکت میشود. شارپسازی نمیتواند اطلاعات از دسترفته را برگرداند.
راهحل درست:
- استفاده از شاتر سریعتر
- نورپردازی قویتر و کنترلشده
- انتخاب لنز مناسب
- نصب دوربین در زاویه درست
- تنظیم Gain در حد قابلقبول
- استفاده از سنسور حساستر در شب
وقتی تصویر از ابتدا درست ثبت شود، دیگر نیازی به پردازش تهاجمی نیست.
۱۷. جمعبندی فنی
پردازش تصویر اولیه در دوربین، اگر کنترلشده و مناسب باشد، میتواند مفید باشد؛ اما اگر نامناسب، تهاجمی و غیرشفاف باشد، بهویژه در برندهای متفرقه، میتواند تصویر پلاک را به شکل مصنوعی شارپ کند. این شارپشدن مصنوعی برخلاف تصور عمومی همیشه مزیت نیست و در بسیاری موارد باعث افت دقت پلاکخوانی میشود.
مهمترین اثرات منفی آن عبارتاند از:
- ایجاد هاله اطراف کاراکترها
- تغییر ضخامت واقعی حروف و اعداد
- چسبیدن کاراکترهای نزدیک
- تقویت نویز و لکههای سطح پلاک
- ایجاد لبههای کاذب
- کاهش پایداری فریمها
- افزایش خطای OCR
- ناسازگاری با مدلهای یادگیری عمیق
- تشدید artifactهای فشردهسازی
- سختشدن تنظیم و عیبیابی سیستم
در مقابل، دوربینهای صنعتی و برندهای معتبر ماشینبینایی معمولاً به دلیل امکان کنترل دقیق، خروجی خام یا کمپردازششده، رفتار پایدار و مستندات فنی بهتر، برای پروژههای جدی پلاکخوانی انتخاب مطمئنتری هستند.
نتیجهگیری
در پلاکخوانی، کیفیت تصویر فقط به معنی شارپبودن ظاهری نیست. تصویر خوب برای پلاکخوانی تصویری است که اطلاعات واقعی پلاک را دقیق، پایدار و بدون دستکاری مخرب منتقل کند. بسیاری از برندهای متفرقه با اعمال پردازش تصویر اولیه نامناسب، مخصوصاً شارپسازی داخلی و غیرقابلکنترل، تصویری تولید میکنند که برای چشم انسان واضحتر به نظر میرسد اما برای ماشینبینایی آلوده به artifact است.
اگر هدف صرفاً مشاهده تصویر باشد، شاید چنین پردازشی قابلقبول باشد. اما اگر هدف خواندن دقیق پلاک، کاهش خطای OCR، ثبت قابل استناد و عملکرد پایدار در روز و شب است، باید از دوربینی استفاده شود که پردازش تصویر آن قابلکنترل، قابلغیرفعالسازی و قابلاعتماد باشد.
بنابراین اصل مهم این است:
در پلاکخوانی حرفهای، تصویر طبیعی و کنترلشده بهتر از تصویر شارپشده و دستکاریشده است. شارپسازی مصنوعی، بهخصوص در دوربینهای متفرقه، نهتنها تضمینکننده دقت نیست، بلکه میتواند یکی از دلایل اصلی خطای پلاکخوانی باشد.
افت دقت OCR به خاطر شارپسازی مصنوعی را متوقف کنید
اگر تصویر دوربین «خیلی شارپ» است اما نرخ پلاکخوانی شما نوسان دارد، احتمالاً با Halo، لبههای کاذب و تقویت نویز ناشی از Edge Enhancement روبهرو هستید.
ما با تحلیل نمونهفریمهای روز/شب، بررسی تنظیمات ISP (Sharpness/WDR/NR) و کیفیت فشردهسازی، به شما کمک میکنیم خروجی دوربین را برای ANPR/LPR به حالت پایدار و قابلاعتماد برسانید (بدون اتکا به «شارپنمایی»).
3 تا 5 فریم نمونه + مشخصات نصب (فاصله، زاویه، سرعت خودرو، روز/شب) را ارسال کنید تا پیشنهاد تنظیمات و گزینههای جایگزین دوربین/لنز را دریافت کنید.
شارپسازی مصنوعی یک پردازش دیجیتال در ISP دوربین است که با تقویت اختلاف روشنایی در اطراف لبهها، تصویر را ظاهراً واضحتر نشان میدهد؛ اما لزوماً جزئیات واقعی جدیدی تولید نمیکند.
چون پلاکخوانی به مرزهای واقعی کاراکترها نیاز دارد. Edge Enhancement با ایجاد هاله (Halo)، تغییر ضخامت خطوط و لبههای کاذب میتواند فرم حروف/اعداد را از حالت واقعی خارج کند و خطای OCR را بالا ببرد.
نه. «شارپتر به چشم انسان» میتواند نتیجهی پردازش تهاجمی باشد. پلاکخوانی بهتر معمولاً از تصویر وفادار، پایدار و کمپردازش به دست میآید، نه تصویر زیباتر.
با زوم 100% تا 200% روی لبه کاراکترها:
اگر نوار روشن/تیره غیرطبیعی دور حروف دیدید یا لبهها حالت ringing/halo داشتند، احتمالاً Edge Enhancement فعال یا بیشازحد است.
چون بخشی از شارپسازی ممکن است در سطح ISP و بهصورت پیشفرض/پنهان اعمال شود و تنظیمات منو فقط شدت را کم کند، نه اینکه پردازش را واقعاً غیرفعال کند. همچنین بعضی مدلها الگوریتمهای Auto دارند که در صحنههای مختلف تغییر میکنند.
چسبیدن کاراکترهای نزدیک به هم
تغییر شکل ۰/۸، ۱/۷ و کاراکترهای مشابه
تقویت نویز سطح پلاک و اشتباه گرفتن لکهها بهعنوان کاراکتر
ناپایداری خروجی OCR بین فریمها (یک پلاک، چند خوانش متفاوت)
بله، چون Edge Enhancement میتواند باعث Domain Shift شود: مدل روی لبههای طبیعی آموزش دیده، اما در اجرا با لبههای هالهدار و دستکاریشده روبهرو میشود؛ نتیجه: افت دقت و افزایش خطا، مخصوصاً در شرایط شب/IR.
Edge Enhancement فرکانسهای بالا را زیاد میکند و این دقیقاً همان چیزی است که فشردهسازی با آن مشکل دارد؛ بنابراین artifactهایی مثل ringing، موجدار شدن لبهها، بلوکی شدن میتواند تشدید شود و کیفیت مفید برای OCR کاهش یابد.
اصل حرفهای این است:
Edge Enhancement داخل دوربین خاموش یا حداقل ممکن
بهبود تصویر (اگر لازم شد) در نرمافزار بیرونی کنترلشده و قابل تست
چون تنظیمات بیرونی قابل پایش، قابل بازگشت و قابل تطبیق با OCR هستند.
Sharpness را کمینه کنید
Noise Reduction را تهاجمی نکنید (ترکیب NR + Sharpening بدترین حالت است)
WDR را با احتیاط و فقط با تست OCR واقعی فعال کنید
بیتریت را بالا ببرید و تا حد امکان از خروجی کمفشردهتر استفاده کنید
نور/شاتر را درست تنظیم کنید تا نیاز به شارپسازی جبرانی کمتر شود





