پکیجهای امبدد بهجای راهحلهای قدیمی؛ چرا Jetson میتواند آینده سیستمهای تعبیهشده در مدیریت ترافیک را بسازد؟

معماری Edge AI برای سامانههای ترافیکی طراحی سیستمهای تعبیهشده (Embedded Systems) برای مدیریت ترافیک هوشمند اگر در حال توسعه یا ارتقای سامانههای کنترل ترافیک، ANPR، تحلیل ویدئوی شهری یا پایش بزرگراهها هستید، انتخاب معماری صحیح…
طراحی سیستمهای تعبیهشده (Embedded Systems) برای مدیریت ترافیک هوشمند
اگر در حال توسعه یا ارتقای سامانههای کنترل ترافیک، ANPR، تحلیل ویدئوی شهری یا پایش بزرگراهها هستید، انتخاب معماری صحیح Edge AI و سیستمهای تعبیهشده میتواند نقش تعیینکنندهای در دقت تحلیل، تأخیر پردازش، هزینه زیرساخت و مقیاسپذیری سامانه داشته باشد.
ما با تجربه عملی در طراحی سامانههای مبتنی بر NVIDIA Jetson، پردازش ویدئوی لبه (Edge Video Analytics)، بینایی ماشین و معماریهای صنعتی Embedded به شما کمک میکنیم یک زیرساخت پایدار، مقیاسپذیر و آماده برای توسعههای آینده AI طراحی کنید.
سناریوی پروژه، تعداد دوربینها، نوع تحلیل موردنیاز و محدودیتهای عملیاتی را برای ما ارسال کنید تا یک معماری پیشنهادی مبتنی بر Jetson و Edge AI برای پروژه شما طراحی کنیم.
مقدمه
اگر شما در حوزه اجرا، بهرهبرداری یا توسعه سامانههای مدیریت ترافیک فعالیت میکنید، احتمالاً با یک واقعیت کاملاً ملموس روبهرو هستید:
نیازهای امروز شهرها و جادهها دیگر با معماریهای قدیمی و پراکنده جواب نمیگیرند.
تا دیروز، شاید یک سیستم ثبت تخلف، یک کنترلر چراغ راهنمایی، یک دوربین نظارتی و یک سرور مرکزی جداگانه کافی بود. اما امروز مسئله فرق کرده است. اکنون از سامانه ترافیکی انتظار میرود که:
- در لبه شبکه و بدون وابستگی دائمی به مرکز داده تصمیم بگیرد
- تصاویر چند دوربین را همزمان تحلیل کند
- وقایع غیرعادی را در لحظه تشخیص دهد
- تراکم، توقف، حادثه، تغییر الگوی جریان و تخلف را بهصورت Real-Time بفهمد
- و در آینده، حتی با کمک مدلهای هوش مصنوعی مولد و عاملهای هوشمند با اپراتور تعامل کند
اینجاست که مفهوم پکیج امبدد یا همان Embedded Package از یک انتخاب فنی به یک ضرورت راهبردی تبدیل میشود.
و در میان همه پلتفرمهایی که امروز در بازار Edge AI وجود دارند، خانواده NVIDIA Jetson بهویژه Orin و Thor، جدیترین نامزد برای ساخت نسل بعدی سامانههای ترافیکی هوشمند هستند.
در این مقاله بررسی میکنیم:
- چرا راهحلهای قدیمی در حال کنار رفتن هستند
- پکیجهای امبدد دقیقاً چه مسئلهای را حل میکنند
- Jetson چه مزیتی نسبت به گزینههای سنتی و رقبای بازار دارد
- و چرا برای مجریان مدیریت ترافیک، انتخاب این نوع پلتفرم میتواند همزمان یک تصمیم فنی، اقتصادی و آیندهنگر باشد

از معماری سنتی تا پکیج امبدد؛ چرا این گذار اجتنابناپذیر است؟
معماری قدیمی چه بود؟
در بسیاری از پروژههای سنتی امبدد، یک سیستم از چند جزء جداگانه تشکیل میشد:
- میکروکنترلر برای کنترل سطح پایین
- پردازنده کاربردی برای اجرای سیستمعامل و منطق اصلی
- کارت FPGA یا DSP برای پردازش تصویر یا سیگنال
- ماژولهای جداگانه ارتباطی برای Ethernet، CAN، Wi-Fi و مانند آن
- بخشهای جداگانه توان و خنکسازی
- و اغلب یک PC صنعتی برای پردازشهای سنگینتر
از نظر مهندسی، این ساختار سالها کار کرده است. اما مشکل اینجاست که این معماری متعلق به دورهای بود که سیستمها نسبتاً تکمنظوره بودند.
در آن زمان، شما لازم نبود روی یک گره کنار خیابان همزمان این کارها را انجام دهید:
- پردازش ویدئوی چند کاناله
- تحلیل AI برای تشخیص خودرو، پلاک، تراکم و حادثه
- اجرای منطق کنترلی
- ارتباط با مرکز
- و ذخیرهسازی، امنیت و بهروزرسانی از راه دور
چرا این معماری دیگر کافی نیست؟
چون هرچه نیازمندیها چندوجهیتر میشوند، راهحلهای چند-بردی و پراکنده چند مشکل بنیادین ایجاد میکنند:
1. پیچیدگی یکپارچهسازی بالا میرود
هر قطعه سختافزار درایور، Firmware، سازگاری و ملاحظات خاص خود را دارد.
این یعنی هر پروژه جدید عملاً به یک پروژه Integration سنگین تبدیل میشود.
2. نقاط خرابی بیشتر میشود
هر اتصال، هر کانکتور، هر برد واسط و هر ماژول جداگانه یک نقطه شکست بالقوه است.
در سامانههای ترافیکی که در گرما، گردوغبار، رطوبت یا لرزش کار میکنند، این موضوع بسیار مهم است.
3. زمان عرضه به بازار طولانی میشود
وقتی تیم باید سختافزار را از اجزای مختلف بسازد و نرمافزار را روی چند لایه ناهمگون هماهنگ کند، پروژه از ماهها به فصلها و گاهی سالها میکشد.
4. نگهداری و توسعه گران میشود
هر ارتقا یا افزودن قابلیت جدید، وابستگی جدیدی میسازد. این یعنی هزینه نگهداری در طول عمر سیستم بالا میرود.
5. برای AI مدرن مناسب نیست
راهحلهای قدیمی برای کنترل یا پردازش محدود خوب بودند، اما برای Edge AI چندوجهی، بهویژه وقتی بحث بینایی ماشین، تحلیل ویدئو و مدلهای زبانی مطرح میشود، ناکارآمد میشوند.

پکیج امبدد چیست و چرا برای مدیریت ترافیک مهم است؟
پکیج امبدد یعنی یک راهحل یکپارچه که اجزای اصلی یک سیستم تعبیهشده را در قالب یک ماژول یا پلتفرم هماهنگ ارائه میکند.
یعنی بهجای اینکه شما CPU، شتابدهنده AI، حافظه، مدیریت توان، I/O و لایه نرمافزار را جدا جدا بخرید و یکپارچه کنید، یک پلتفرم مجتمع میگیرید که برای کار واقعی طراحی شده است.
این تغییر، فقط از جنس «راحتتر شدن طراحی» نیست.
فلسفه عمیقتر آن این است که ارزش اصلی پروژه از سختی یکپارچهسازی به سمت منطق کاربردی منتقل شود.
برای مدیریت ترافیک، این یعنی تیم شما بهجای درگیر شدن با دهها مسئله زیرساختی، روی این پرسشها تمرکز میکند:
- چگونه دقت تشخیص تخلف را بالا ببریم؟
- چگونه تأخیر پاسخ را کم کنیم؟
- چگونه وابستگی به Cloud را کاهش دهیم؟
- چگونه پردازش را نزدیک به دوربین یا تقاطع بیاوریم؟
- چگونه سامانه را در مقیاس شهری توسعه دهیم؟
مزایای کلیدی پکیج امبدد
1. کاهش Time-to-Market
این مزیت برای پروژههای شهری بسیار مهم است. وقتی مناقصه، اجرا و تحویل زمانبندی فشرده دارند، پلتفرم آماده باعث میشود سریعتر از فاز طراحی وارد فاز استقرار شوید.
2. قابلیت اطمینان بالاتر
پکیجهای یکپارچه به دلیل کاهش اتصالات و اجزای پراکنده، نرخ خرابی پایینتری دارند. در محیطهای بیرونی، این مزیت مستقیماً به کاهش هزینه عملیاتی تبدیل میشود.
3. مدیریت بهتر توان و حرارت
سامانه کنار خیابان یا در کابین تقاطع، همیشه فضای کافی یا تهویه ایدهآل ندارد. پکیجهای مدرن مثل Jetson مدیریت توان و حرارت بسیار بهتری نسبت به ترکیبهای سنتی دارند.
4. اکوسیستم نرمافزاری بالغ
SDK، درایور، ابزار مانیتورینگ، مدلهای آماده و فریمورکهای استاندارد، بخش بزرگی از ریسک توسعه را حذف میکنند.
5. مقیاسپذیری
شما میتوانید با یک مدل سبک شروع کنید و بعد، بدون بازنویسی کل معماری نرمافزار، به ماژول قدرتمندتر مهاجرت کنید.
چرا Jetson در مرکز این تحول قرار گرفته است؟
خانواده NVIDIA Jetson امروز فقط یک برد توسعه نیست؛ یک استاندارد عملیاتی برای Edge AI است.
علت این موفقیت فقط قدرت خام GPU نیست. دلیل اصلی، ترکیب چند عامل با هم است:
- سختافزار بهینه برای AI
- مصرف توان مناسب نسبت به کارایی
- اکوسیستم نرمافزاری کامل
- پشتیبانی از مدلها و فریمورکهای مدرن
- امکان مقیاسپذیری از پروژه کوچک تا سامانه صنعتی
- و مهمتر از همه، پیوستگی بین Cloud و Edge
این پیوستگی چرا مهم است؟
چون در پروژههای ترافیکی آینده، مدلها ممکن است در مرکز آموزش ببینند، اما باید در لبه اجرا شوند.
Jetson از این نظر یک مزیت عمیق دارد: همان منطق، همان ابزارها و همان پشته نرمافزاری که در مقیاس بزرگتر NVIDIA میشناسیم، در لبه هم ادامه پیدا میکند.
تکامل Jetson؛ از TX2 تا Thor
روند تکامل Jetson را اگر نگاه کنیم، یک نکته کاملاً روشن است:
NVIDIA فقط «قدرت پردازشی» اضافه نکرده، بلکه پلهپله در حال ساختن ستون فقرات آینده امبدد هوشمند بوده است.
نسلهای مهم Jetson
| نسل | محصول | سال عرضه | حداکثر عملکرد AI | توان مصرفی |
|---|---|---|---|---|
| ۱ | Jetson TX2 | 2017 | 1.3 TFLOPS | 7.5W |
| ۲ | Jetson AGX Xavier | 2018 | 32 TOPS | 10–30W |
| ۲ | Jetson Xavier NX | 2019 | 21 TOPS | 10–20W |
| ۳ | Jetson Orin Nano | 2022 | 40 TOPS | 7–15W |
| ۳ | Jetson Orin NX | 2022 | 100 TOPS | 10–25W |
| ۳ | Jetson AGX Orin | 2022 | 275 TOPS | 15–60W |
| ۴ | Jetson Thor T4000 | 2025 | 1200 FP4 TFLOPS | 70W |
| ۴ | Jetson Thor T5000 | 2025 | 2070 FP4 TFLOPS | 130W |
اگر این جدول را از منظر یک مجری ترافیک ببینیم، معنایش این است که امروز میتوان از یک ماژول کوچک شروع کرد و فردا به پلتفرمی رسید که نه فقط ویدئو و AI، بلکه LLM و تصمیمگیری چندوجهی را هم در لبه انجام دهد.
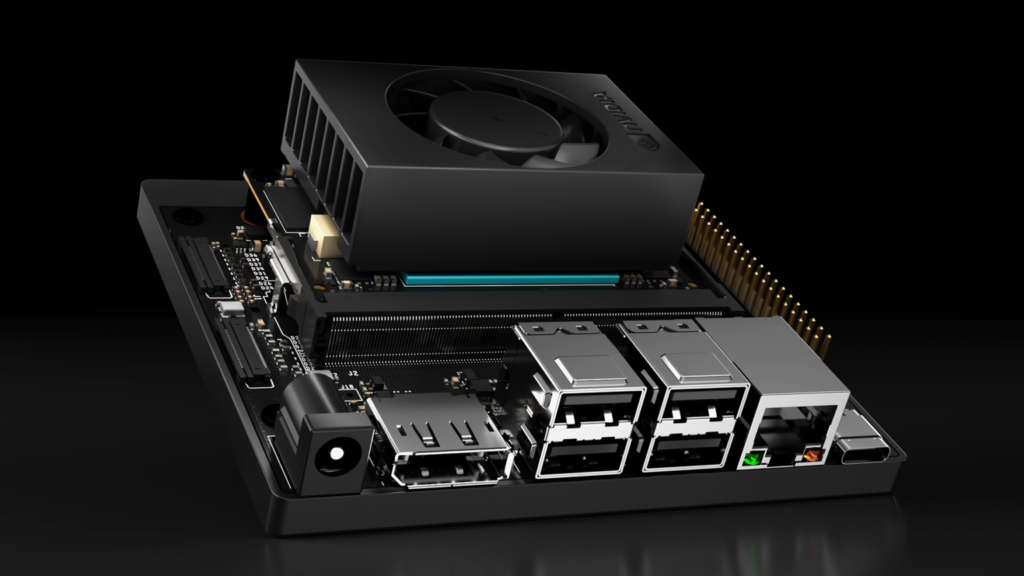
Jetson Orin؛ انتخاب عملی امروز
اگر مقاله را بخواهیم از منظر «امروز چه باید خرید و کجا باید استفاده کرد؟» ببینیم، پاسخ در بسیاری از پروژهها Jetson Orin است.
Jetson Orin Nano
- حدود 40 TOPS
- توان 7 تا 15 وات
- مناسب برای پروژههای سبکتر، پایلوتها، سنسورهای هوشمند، دوربینهای AI ساده
کاربرد ترافیکی محتمل:
شمارش تردد، تشخیص پایه وسیله نقلیه، پایش یک یا دو جریان تصویری، گرههای کممصرف.
Jetson Orin NX
- حدود 100 TOPS
- توان 10 تا 25 وات
- حافظه 16GB LPDDR5
- با JetPack 6.2 و حالت SUPER، جهش عملکردی بیشتر
چرا مهم است؟
چون برای بسیاری از سامانههای مدیریت ترافیک، دقیقاً همان نقطه تعادل بین قدرت، ابعاد، مصرف انرژی و قیمت است.
کاربرد ترافیکی محتمل:
- تقاطع هوشمند
- تشخیص پلاک و کلاسبندی خودرو
- تحلیل چند دوربین
- پایش تراکم و صف
- تشخیص تخلف در گرههای لبه
Jetson AGX Orin
- 275 TOPS
- توان 15 تا 60 وات
- حافظه تا 64GB
- مناسب برای کاربردهای سنگین و چندحسگری
کاربرد ترافیکی محتمل:
- پردازش همزمان چند جریان ویدئویی با مدلهای پیچیده
- فیوژن دوربین، رادار، لیدار یا دادههای جانبی
- گرههای لبه در بزرگراهها، مراکز شهری و سامانههای پیشرفته نظارت
چرا Orin برای مدیریت ترافیک جذاب است؟
چون مدیریت ترافیک معمولاً یک مسئله صرفاً AI نیست، بلکه AI + ارتباط + کنترل + قابلیت صنعتی + نگهداریپذیری است.
Orin دقیقاً به همین دلیل موفق شده: نه آنقدر سبک است که فقط برای دمو مناسب باشد، نه آنقدر سنگین که فقط در رباتهای پیشرفته معنا پیدا کند.
Jetson Xavier، Nano و TX2؛ میراثی که هنوز مهم است
هرچند امروز تمرکز بازار روی Orin و Thor است، اما نسلهای قبلی Jetson یک نکته مهم را ثابت کردند:
امبدد AI باید از آزمایشگاه به محصول واقعی برسد.
- Jetson Nano ورود هزاران تیم، دانشگاه، استارتاپ و سازنده به دنیای Edge AI را ممکن کرد.
- TX2 نشان داد میتوان در توان پایین، AI مفید اجرا کرد.
- Xavier NX و AGX Xavier نخستین موج جدی سیستمهای صنعتی AI-ready را شکل دادند.
چرا یادآوری این نسلها مهم است؟
چون برای مدیران اجرایی، بلوغ اکوسیستم اهمیت دارد. Jetson یک فناوری تازه و اثباتنشده نیست؛ یک مسیر تکاملیافته است که پشت آن سالها تجربه صنعتی قرار دارد.
Jetson Thor؛ جهش بزرگ به آینده امبدد
اگر Orin انتخاب امروز است، Thor تصویر فرداست.
NVIDIA با معرفی Jetson Thor در نیمه دوم ۲۰۲۵، اساساً یک پیام روشن به بازار داد:
آینده امبدد فقط بینایی ماشین نیست؛ آینده امبدد، Physical AI، رباتیک عمومی و Generative AI در لبه است.
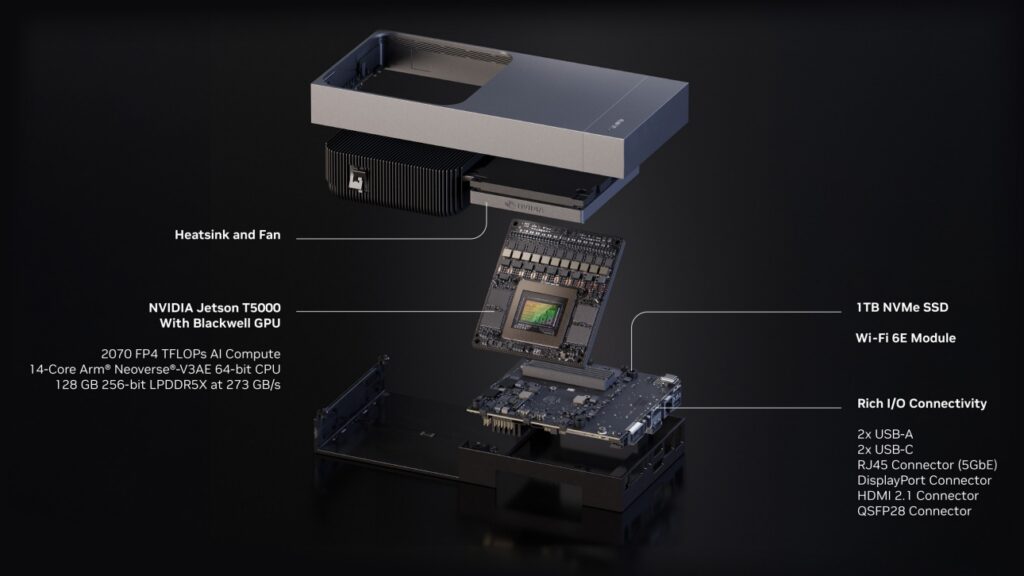
مشخصات کلیدی Thor
-
Jetson T5000
- 2070 FP4 TFLOPS
- 128GB حافظه
- پهنای باند 273 GB/s
- توان 130W
-
Jetson T4000
- 1200 FP4 TFLOPS
- 64GB حافظه
- توان 70W
چرا Thor مهم است؟
چون برای اولین بار، چیزی را به لبه آورده که قبلاً تقریباً انحصار دیتاسنتر بود:
اجرای مدلهای زبانی بزرگ و بارهای کاری چندوجهی پیچیده با ظرفیت صنعتی.
طبق دادههای گزارش:
- 7.5 برابر سریعتر از AGX Orin در AI
- 3.5 برابر بهینهتر از نظر انرژی
- 3.1 برابر رشد CPU
- 10 برابر افزایش توان I/O
- و 7000 برابر رشد نسبت به Jetsonهای 10 سال قبل
این فقط یک عدد هیجانانگیز نیست.
معنای عملی آن برای مدیریت ترافیک این است که گرههای لبه آینده میتوانند از «تشخیص ساده» عبور کنند و به «فهم صحنه» برسند.
Thor چه چیزی را در عمل ممکن میکند؟
1. تحلیل چندوجهی در مقیاس بالا
Thor میتواند تا 16 جریان سنسور را همزمان پردازش کند.
برای یک سامانه ترافیکی، این یعنی یک گره لبه میتواند همزمان:
- چند دوربین تقاطع را پردازش کند
- دادههای جانبی را بگیرد
- تخلفها را تشخیص دهد
- وضعیت جریان را تحلیل کند
- و خروجی قابل فهم برای مرکز تولید کند
2. اجرای LLM در لبه
مدلهایی مانند Llama 3.3 70B و DeepSeek R1 70B روی AGX Thor اجرا شدهاند.
این یعنی در آینده، اپراتور ترافیک میتواند با سیستم صحبت کند، پرسش بپرسد، گزارش بگیرد و پاسخ تحلیلی دریافت کند؛ آن هم بدون تکیه کامل بر Cloud.
3. جداسازی بارهای کاری با MIG
قابلیت Multi-Instance GPU اهمیت بسیار زیادی دارد.
فلسفه این قابلیت این است که بارهای حساس به ایمنی و زمان، از بارهای غیرحساس جدا شوند.
برای مثال در یک سامانه پیشرفته:
- بخش کنترل یا تحلیل بحرانی در یک پارتیشن اجرا شود
- بخش مکالمه، گزارشسازی یا تحلیل ثانویه در پارتیشن دیگر
این جداسازی برای کاربردهای شهری و صنعتی بسیار مهم است، چون پایداری و پیشبینیپذیری را بالا میبرد.
4. Quantization پیشرفته با NVFP4
فرمت NVFP4 اجازه میدهد مدلهای بزرگ با مصرف حافظه و توان کمتر اجرا شوند.
علت اهمیتش روشن است: در لبه، همیشه محدودیت حافظه، مصرف و گرما وجود دارد. هر بهبود در Quantization، مستقیماً به امکان اجرای مدلهای بزرگتر روی سختافزار فشردهتر منجر میشود.
5. Predictive Decoding
این تکنیک باعث میشود سرعت تولید توکنها در مدلهای زبانی تا چند برابر بهتر شود.
در کاربردهای ترافیکی آینده، این به معنی پاسخگویی سریعتر سامانههای تحلیلی و عاملهای هوشمند خواهد بود.
اکوسیستم نرمافزاری Jetson؛ مزیتی که گاهی از خود سختافزار مهمتر است
بسیاری از تصمیمگیران، هنگام انتخاب پلتفرم روی TOPS یا قیمت تمرکز میکنند. اما در پروژههای واقعی، عامل برنده اغلب اکوسیستم است.
Jetson اینجا مزیت عمیقی دارد:
- JetPack
- CUDA
- TensorRT
- PyTorch / TensorFlow support
- Isaac ROS
- Metropolis
- Holoscan
- vLLM Containers
- جامعه توسعهدهندگان، مستندات و نمونههای فراوان
چرا این مهمتر از اعداد خام است؟
چون یک پروژه ترافیکی فقط خرید سختافزار نیست.
شما باید:
- مدل را آموزش دهید یا تطبیق دهید
- در لبه مستقر کنید
- بهروزرسانی کنید
- کارایی را مانیتور کنید
- و در طول زمان توسعه بدهید
اگر پلتفرم از ابتدا تا انتها ابزار نداشته باشد، هزینه پنهان پروژه به شدت بالا میرود.
به همین دلیل است که Jetson در بسیاری از پروژهها، حتی اگر ارزانترین گزینه نباشد، اقتصادیترین گزینه در کل چرخه عمر میشود.

Jetson در برابر رقبا؛ چه زمانی بهترین انتخاب است و چه زمانی نه؟
در بازار Edge AI، رقبای مهمی وجود دارند و باید منصفانه به آنها نگاه کرد.
Qualcomm Snapdragon
مزیت اصلی:
- توان پایین
- 5G داخلی
- مناسب برای دستگاههای متصل و کاربردهای موبایلمانند
ضعف:
- برای AI سنگین و چندوجهی، معمولاً به قدرت و انعطاف Jetson نمیرسد
Intel Movidius Myriad X
مزیت:
- مصرف بسیار پایین
- عالی برای Vision AI خاص
ضعف:
- پلتفرم کامل نیست؛ یک کمکپردازنده است
Google Coral
مزیت:
- ارزان
- کممصرف
- مناسب برای مدلهای سبک TFLite
ضعف:
- محدود به TFLite و انعطاف پایین
Hailo
مزیت:
- TOPS/W بسیار عالی
- گزینهای خوب برای دوربینهای هوشمند و بارهای vision-centric
ضعف:
- معمولاً برای کار به Host CPU نیاز دارد
- برای Vision+Language+Control به اندازه Jetson منعطف نیست
AMD/Xilinx Kria
مزیت:
- تأخیر قطعی و بسیار پایین
- مناسب برای سناریوهای FPGA-محور
ضعف:
- پیچیدگی توسعه بالا
- اکوسیستم کوچکتر
NXP i.MX 9
مزیت:
- مناسب برای خودرو و Functional Safety
- خوب برای کاربردهای خاص صنعتی
ضعف:
- برای AI عمومی و رباتیک رقیب مستقیم Jetson نیست
Raspberry Pi AI
مزیت:
- هزینه پایین
- مناسب برای prototyping و DIY
ضعف:
- برای پروژههای صنعتی و شهری در سطح حرفهای، معمولاً کافی نیست
جمعبندی رقابتی
اگر پروژه شما:
- فقط یک مدل سبک بینایی میخواهد،
- توان بسیار پایین میخواهد،
- و پیچیدگی AI کم است،
ممکن است Hailo یا Coral یا حتی Raspberry Pi AI مناسب باشند.
اما اگر پروژه شما:
- چندوجهی است،
- قرار است رشد کند،
- به اکوسیستم بالغ نیاز دارد،
- و احتمال دارد در آینده LLM، عامل هوشمند یا تحلیل چندسنسوری اضافه شود،
Jetson انتخاب منطقیتری است.
و این دقیقاً همان چیزی است که در مدیریت ترافیک مدرن بیشتر دیده میشود.

کاربرد Jetson در مدیریت ترافیک؛ از دوربین تا تصمیم
حالا بیایید دقیقتر به مخاطب اصلی مقاله برگردیم: مجریان مدیریت ترافیک.
1. دوربینهای ترافیکی هوشمند
امروز یک دوربین ترافیکی فقط ثبتکننده تصویر نیست. میتواند:
- شمارش وسیله نقلیه انجام دهد
- خودروها را طبقهبندی کند
- تراکم را تخمین بزند
- توقف غیرمجاز را تشخیص دهد
- رفتار غیرعادی را کشف کند
پکیج امبدد اینجا مهم است، چون همه این قابلیتها را در یک گره محلی جمع میکند.
2. کاهش وابستگی به Cloud
در گزارش اشاره شده که یک دوربین هوشمند ترافیکی توانسته پهنای باند Cloud را 80٪ کاهش دهد.
این عدد بسیار معنادار است، چون در پروژههای شهری، انتقال دائمی ویدئوی خام هم گران است و هم از نظر زیرساختی پرریسک.
3. تصمیمگیری سریعتر
وقتی پردازش در لبه انجام شود:
- تأخیر کمتر میشود
- وابستگی به لینک ارتباطی کاهش مییابد
- و سیستم در شرایط قطعی ارتباط هم کار میکند
4. حفظ حریم خصوصی
در بسیاری از پروژهها، بهتر است فقط متادیتا یا نتیجه تحلیل ارسال شود، نه تصویر خام.
پکیجهای امبدد قدرتمند این امکان را میدهند که «فهم» در محل انجام شود.
5. ارتقای تدریجی
شما میتوانید ابتدا یک سامانه شمارش و کلاسبندی اجرا کنید و بعد، بدون تعویض کامل معماری، قابلیتهایی مثل:
- تحلیل رفتار
- تشخیص حادثه
- پیشبینی تراکم
- و دستیار اپراتوری مبتنی بر LLM
را اضافه کنید.
LLM روی Jetson؛ چرا برای ترافیک مهم است؟
ممکن است در نگاه اول اجرای مدل زبانی روی Jetson برای ترافیک غیرضروری به نظر برسد. اما اگر کمی عمیقتر نگاه کنیم، آینده خیلی روشن است.
سناریوهای محتمل
- اپراتور بپرسد:«در ۳۰ دقیقه گذشته، علت افت سرعت در محور X چه بوده؟»
- سامانه پاسخ دهد:«بر اساس تحلیل سه دوربین و داده صف، احتمالاً توقف دوبله و انسداد مقطعی در لاین دوم عامل اصلی بوده است.»
- یا سیستم بتواند گزارش متنی از وضعیت تقاطعها تولید کند
- یا از دادههای چند منبع، خلاصه مدیریتی برای شیفت بعدی بسازد
این یعنی عبور از «پردازش تصویر» به «پردازش معنا».
Jetson Thor این مسیر را واقعیتر کرده است، چون میتواند مدلهای بزرگ را در لبه اجرا کند.
پروژههایی مانند LLM Langchain on NVIDIA Jetson هم نشان میدهند که RAG، حافظه مکالمهای و ابزارهای هوشمند در لبه دیگر صرفاً ایده نیستند.
سیستمعاملها و آینده نرمافزار در امبدد
در کنار سختافزار، روند سیستمعاملها هم مهم است.
OpenHarmony
در سالهای اخیر OpenHarmony بهویژه در بازارهای صنعتی و آسیایی رشد کرده است.
اهمیتش در این است که نشان میدهد آینده امبدد فقط حول Linux سنتی نمیچرخد؛ بلکه اکوسیستمهای جدید، صنعتی و بومیشده در حال شکلگیری هستند.
Zephyr و FreeRTOS
برای گرههای سبک، RTOSها همچنان مهماند.
فلسفه اینجا این است که همیشه قرار نیست هر گره یک ابررایانه کوچک باشد. بعضی گرهها فقط حسگر، کنترلگر یا نود کممصرف هستند. آینده امبدد، ترکیبی از این لایههاست.

روندهای ۲۰۲۶ تا ۲۰۳۰؛ آینده به کدام سمت میرود؟
1. همگرایی Cloud و Edge
آموزش در مرکز، استنتاج در لبه، بهروزرسانی پیوسته، و حلقه بازخورد بین آنها، به مدل استاندارد تبدیل خواهد شد.
2. رشد Physical AI
امبدد آینده فقط «هوشمند» نیست؛ «درککننده و عملکننده» است.
این روند از رباتیک شروع شده، اما به سامانههای شهری هم میرسد.
3. LLMهای بزرگتر روی دستگاههای کوچکتر
با Quantization و فرمتهایی مثل NVFP4، مدلهای بزرگتر در دستگاههای کوچکتر ممکن میشوند.
4. اهمیت Functional Safety و گواهیها
در پروژههای حیاتی، فقط قدرت کافی نیست؛ قابلیت اطمینان، امنیت و چرخه عمر طولانی تعیینکننده میشود.
5. ورود معماریهای نو مانند RISC-V و نورومورفیک
اینها در لایههای بسیار کممصرف اهمیت خواهند یافت، اما برای بارهای کاری پیچیده و چندوجهی، پلتفرمهای سطح بالاتری مثل Jetson همچنان جایگاه کلیدی دارند.
6. عبور از سیستمهای تکمنظوره
پلتفرمهای آینده قرار نیست فقط «یک کار» انجام دهند. ارزش بازار در سیستمهایی خواهد بود که بتوانند با همان سختافزار، کاربردهای جدید بگیرند.
و این دقیقاً همان جایی است که Jetson مزیت پیدا میکند.
نتیجهگیری: پیام این تحول برای مجریان مدیریت ترافیک چیست؟
اگر بخواهیم همه بحث را در یک پیام روشن خلاصه کنیم، آن پیام این است:
دوران راهحلهای پراکنده، تکمنظوره و سختارتقا رو به پایان است.
پروژههای مدیریت ترافیک آینده به پلتفرمهایی نیاز دارند که:
- توان پردازش AI در لبه داشته باشند
- صنعتی و پایدار باشند
- بهسرعت استقرار یابند
- هزینه نگهداری معقول داشته باشند
- و مهمتر از همه، برای نیازهای فردا هم آماده باشند
پکیجهای امبدد دقیقاً پاسخ همین نیاز هستند.
و در میان آنها، NVIDIA Jetson امروز یکی از بالغترین و آیندهدارترین انتخابهاست.
- اگر پروژه شما امروز نیاز عملی و متعادل دارد، Orin بسیار منطقی است.
- اگر به افق ۳ تا ۵ سال آینده، LLM، تحلیل پیشرفته و سامانههای چندوجهی فکر میکنید، Thor تصویر روشنی از آن آینده ارائه میدهد.
چرا این انتخاب مهم است؟
چون انتخاب پلتفرم در اینجا فقط خرید سختافزار نیست؛
در واقع شما دارید مسیر توسعه، سرعت نوآوری، هزینه مالکیت و ظرفیت آینده سامانهتان را انتخاب میکنید.
برای مجریان مدیریت ترافیک، تصمیم درست این است که از خود بپرسند:
- آیا میخواهیم فقط یک سامانه نصب کنیم یا یک پلتفرم قابل توسعه بسازیم؟
- آیا فقط نیاز امروز را میخواهیم جواب دهیم یا زیرساخت فردا را هم آماده کنیم؟
- آیا هنوز میخواهیم با چند سیستم پراکنده کار کنیم یا به سمت یک معماری هوشمند، یکپارچه و قابل ارتقا برویم؟
پاسخ این پرسشها، در بسیاری از پروژهها، شما را به یک نتیجه میرساند:
آینده امبدد، آینده پکیجهای یکپارچه است؛ و Jetson یکی از مهمترین بازیگران این آینده خواهد بود.
جمعبندی اجرایی برای مدیران و مجریان
اگر بخواهم خیلی خلاصه و تصمیممحور بگویم:
وقتی Jetson انتخاب خوبی است:
- چند دوربین یا چند سنسور دارید
- AI در لبه برایتان مهم است
- پروژه قرار است در آینده توسعه پیدا کند
- به اکوسیستم نرمافزاری قوی نیاز دارید
- میخواهید از نمونهسازی تا محصول روی یک مسیر بمانید
وقتی شاید گزینههای دیگر بهتر باشند:
- فقط یک مدل سبک بینایی لازم دارید
- توان مصرفی بسیار محدود است
- پروژه فوقالعاده حساس به قیمت و کمپیچیدگی است
- یا فقط یک شتابدهنده تخصصی برای یک کار خاص میخواهید
اما برای مدیریت ترافیک هوشمند در مقیاس واقعی، مسیر صنعت بهروشنی به سمت پلتفرمهای یکپارچه و AI-ready میرود؛ و در این میدان، Jetson نهفقط یک برد، بلکه یک زیرساخت راهبردی است.
طراحی سیستمهای تعبیهشده (Embedded Systems) برای مدیریت ترافیک هوشمند
اگر در حال توسعه یا ارتقای سامانههای کنترل ترافیک، ANPR، تحلیل ویدئوی شهری یا پایش بزرگراهها هستید، انتخاب معماری صحیح Edge AI و سیستمهای تعبیهشده میتواند نقش تعیینکنندهای در دقت تحلیل، تأخیر پردازش، هزینه زیرساخت و مقیاسپذیری سامانه داشته باشد.
ما با تجربه عملی در طراحی سامانههای مبتنی بر NVIDIA Jetson، پردازش ویدئوی لبه (Edge Video Analytics)، بینایی ماشین و معماریهای صنعتی Embedded به شما کمک میکنیم یک زیرساخت پایدار، مقیاسپذیر و آماده برای توسعههای آینده AI طراحی کنید.
سناریوی پروژه، تعداد دوربینها، نوع تحلیل موردنیاز و محدودیتهای عملیاتی را برای ما ارسال کنید تا یک معماری پیشنهادی مبتنی بر Jetson و Edge AI برای پروژه شما طراحی کنیم.
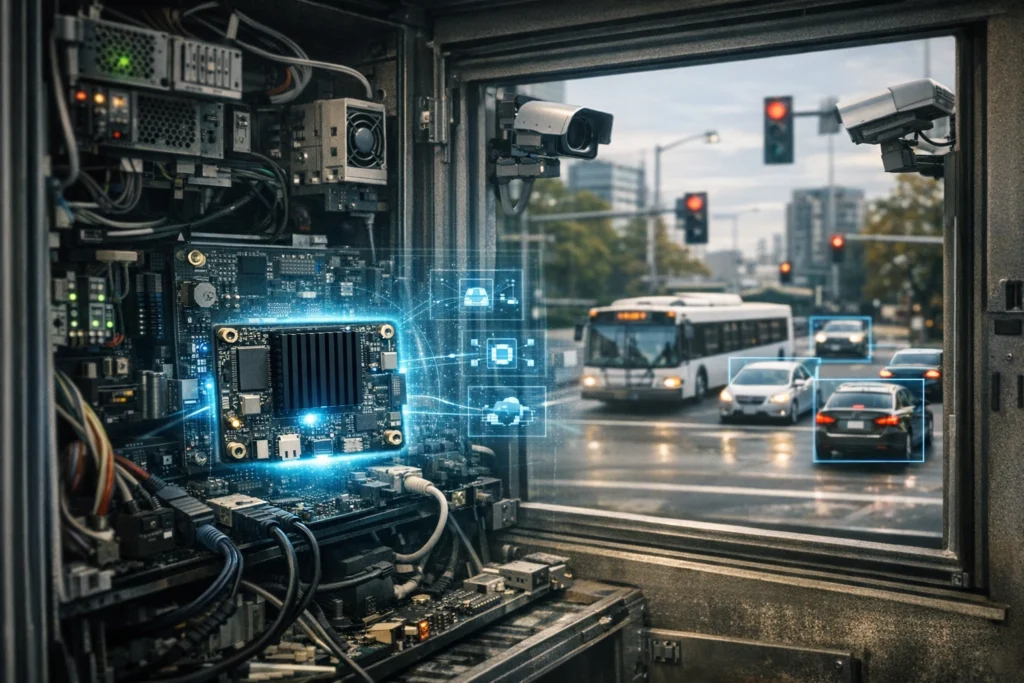
سیستمهای تعبیهشده در سامانههای ترافیکی بهعنوان هسته پردازشی گرههای لبه عمل میکنند. این سیستمها امکان پردازش و تحلیل دادههای دوربین، تشخیص خودرو، پلاکخوانی، تحلیل تراکم و تشخیص تخلف را در محل نصب دوربین و بدون وابستگی کامل به مرکز داده فراهم میکنند.
در معماریهای قدیمی، بیشتر پردازشها در سرور مرکزی انجام میشد و ویدئوی خام باید منتقل میشد. اما در معماری Edge AI، سیستمهای تعبیهشده مستقیماً در محل دوربین داده را تحلیل میکنند که باعث کاهش تأخیر، کاهش مصرف پهنای باند و افزایش پایداری سیستم میشود.
Jetson یک پلتفرم مجتمع برای Edge AI است که CPU، GPU، شتابدهندههای هوش مصنوعی، حافظه و اکوسیستم نرمافزاری کامل را در یک ماژول ارائه میدهد. این ترکیب باعث میشود اجرای مدلهای بینایی ماشین و تحلیل ویدئو در گرههای ترافیکی با مصرف انرژی مناسب امکانپذیر باشد.
Jetson Orin برای کاربردهایی مانند تقاطع هوشمند، تشخیص پلاک خودرو، تحلیل چند جریان ویدئویی، شمارش تردد، تحلیل تراکم و تشخیص تخلفات ترافیکی در لبه شبکه بسیار مناسب است.
Jetson Orin برای بسیاری از کاربردهای فعلی Edge AI مانند بینایی ماشین و تحلیل ویدئو طراحی شده است، در حالی که Jetson Thor نسل بعدی پلتفرمهای امبدد است که قدرت کافی برای اجرای مدلهای زبانی بزرگ (LLM) و تحلیل چندوجهی پیچیده در لبه شبکه را فراهم میکند.
بیشتر پلتفرمهای صنعتی Embedded مانند Jetson برای شرایط محیطی سخت طراحی شدهاند و میتوانند در دما، گردوغبار و لرزش محیطهای شهری و جادهای عملکرد پایدار داشته باشند.
خیر. علاوه بر بینایی ماشین، این سیستمها میتوانند دادههای سنسورها، رادار، لیدار، کنترلرهای ترافیکی و دادههای شبکه را نیز پردازش کنند و در تصمیمگیریهای هوشمند نقش داشته باشند.
یکی از مزایای پلتفرمهایی مانند Jetson این است که معماری نرمافزاری و سختافزاری آنها مقیاسپذیر است. بنابراین میتوان بدون بازطراحی کامل سیستم، به مدلهای قدرتمندتر مهاجرت کرد یا قابلیتهای جدید AI را اضافه نمود.
روند آینده به سمت سیستمهای تعبیهشده چندوجهی میرود که علاوه بر تحلیل تصویر، از مدلهای هوش مصنوعی پیشرفته، تحلیل رفتاری، پیشبینی ترافیک و حتی دستیارهای مبتنی بر مدلهای زبانی برای تعامل با اپراتورها استفاده میکنند.
بیشتر پلتفرمهای صنعتی Embedded مانند Jetson برای شرایط محیطی سخت طراحی شدهاند و میتوانند در دما، گردوغبار و لرزش محیطهای شهری و جادهای عملکرد پایدار داشته باشند.





