پردازش تصویر سه بعدی: امکان پذیر ساختن درک پیشرفته رباتیک

دههها بود که رویای ساخت رباتهایی که بتوانند مانند انسانها با محیط اطراف خود تعامل داشته باشند، دور از دسترس به نظر میرسید. سیستمهای بینایی دوبعدی سنتی، با وجود انقلابی بودن در زمان خود،…
دههها بود که رویای ساخت رباتهایی که بتوانند مانند انسانها با محیط اطراف خود تعامل داشته باشند، دور از دسترس به نظر میرسید. سیستمهای بینایی دوبعدی سنتی، با وجود انقلابی بودن در زمان خود، در تشخیص عمق، انسداد اجسام و نورپردازی پویا دچار محدودیتهایی بودند که باعث میشد رباتها در محیطهای غیرساختاریافته عملکرد مناسبی نداشته باشند. ورود پردازش تصویر سه بعدی با امکان پذیر ساختن درک پیشرفته رباتیک، تغییری بنیادین ایجاد کرده است که به ماشینها آگاهی فضایی مشابه انسانها میبخشد. این فناوری نه تنها یک پیشرفت تدریجی نیست، بلکه یک تحول اساسی است که صنایع مختلفی از جمله تولید، مراقبتهای بهداشتی و حملونقل را متحول کرده است. با ثبت دادههای حجمی، رباتها اکنون میتوانند اشکال، فواصل و بافتها را در زمان واقعی تشخیص دهند و وظایفی مانند مونتاژ دقیق، ناوبری خودکار و جراحیهای حساس را انجام دهند. در این مقاله، به بررسی فناوریهایی که این تحول را ممکن ساختهاند، کاربردهای آنها و آیندهای که در حال شکل دادن به آن هستند، میپردازیم.
تکامل از 2D به 3D: چرا عمق مهم است؟
در حالی که تصویربرداری دوبعدی برای وظایف سادهای مانند اسکن بارکد یا بازرسی سطح کافی است، در سناریوهای پیچیدهتر ناکارآمد است. برای مثال، یک دوربین 2D نمیتواند تفاوت بین یک سایه و یک جسم فیزیکی را تشخیص دهد یا ارتفاع یک پشته از جعبهها را اندازهگیری کند. در مقابل، پردازش تصویر سهبعدی با افزودن بُعد عمق، این قابلیتها را به رباتها میدهد:
- محاسبهی حجم و جهتگیری اشیا
- ناوبری در اطراف موانع بهصورت بلادرنگ
- جابجایی دقیق اجسام با شکلهای نامنظم
صنایعی مانند تجارت الکترونیک (برای انبارهای خودکار)، خودروسازی (برای خطوط مونتاژ) و بهداشت و درمان (برای جراحیهای کمتهاجمی) از بینایی سهبعدی برای حل مشکلاتی که قبلاً غیرقابل حل بودند، بهره میبرند. بازار جهانی تصویربرداری سهبعدی که در سال 2022 ارزشی معادل 22.4 میلیارد دلار داشت، پیشبینی میشود تا سال 2030 به 77.6 میلیارد دلار برسد که پتانسیل تحولآفرین این فناوری را نشان میدهد.

فناوریهای اصلی در پسِ پردهی بینایی سهبعدی
1. بینایی استریو: تقلید از دید دوچشمی انسان
بینایی استریو از دو دوربین 2D که با فاصلهی مشخصی از یکدیگر قرار گرفتهاند، برای ثبت تصاویر از زوایای مختلف استفاده میکند، مشابه چشمان انسان. با تحلیل اختلاف منظر (جابجایی) بین پیکسلهای متناظر در دو تصویر، الگوریتمها عمق را از طریق مثلثسازی محاسبه میکنند.
جزئیات فنی:
- هندسهی اپیپولار: این چارچوب ریاضی، تطبیق پیکسلها بین دو تصویر را تضمین کرده و پیچیدگی محاسباتی را کاهش میدهد.
- الگوریتمهای همبستگی: تکنیکهایی مانند تطبیق نیمهسراسری (SGM) یا شبکههای عصبی، نقشههای عمق را با مقایسهی همسایگی پیکسلها بهبود میدهند.
- چالشهای کالیبراسیون: حتی ناهماهنگیهای جزئی بین دوربینها میتواند محاسبات عمق را مخدوش کند، بنابراین کالیبراسیون دقیق ضروری است.
بهبودها با نور ساختاریافته:
برای حل مشکلاتی مانند سطوح بدون ویژگی، نور ساختاریافته الگوهایی (مانند شبکهها یا نقاط) را روی اجسام میتاباند. تغییر شکل این الگوها نقاط مرجعی را فراهم میکند که دقت را افزایش میدهند. شرکتهایی مانند Intel (دوربینهای RealSense) و ZED سیستمهای ترکیبی استریو و نور ساختاریافته را برای عملکرد قویتر به کار میگیرند.
کاربردهای فراتر از روباتیک:
- وسایل نقلیه خودران: سیستمهای اولیهی Autopilot تسلا از بینایی استریو برای تشخیص موانع استفاده میکردند.
- کشاورزی: پهپادها برای بهینهسازی آبیاری و سلامت محصول، زمین را نقشهبرداری میکنند.
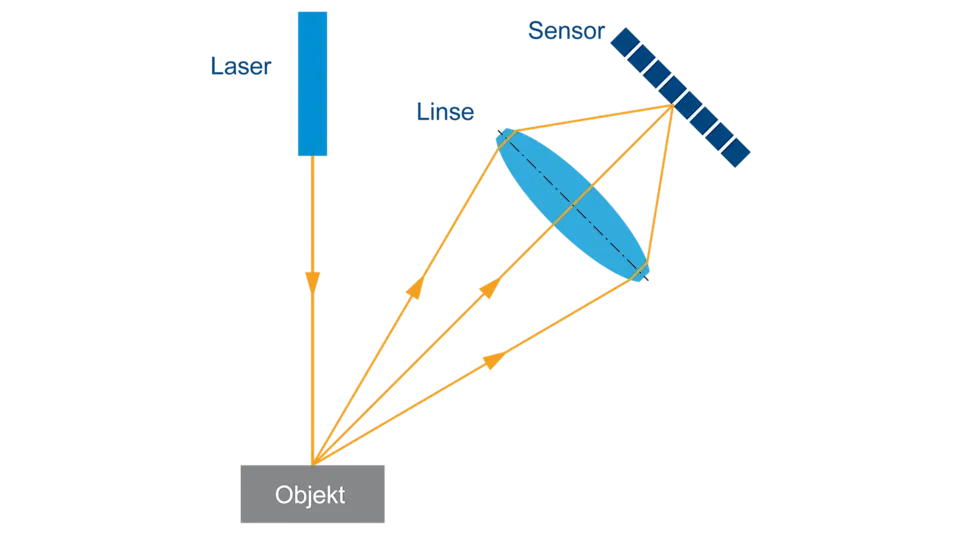
2. مثلثسازی لیزری: دقت در حرکت
این روش، یک خط لیزری را روی یک شیء میتاباند و دوربینی که در زاویهی خاصی قرار دارد، تغییر شکل خط را ثبت میکند. جابجایی خط لیزر با ارتفاع شیء مرتبط است و دقتی در حد میکرومتر را فراهم میکند.
ویژگیهای فنی:
- اسکن در مقابل تصویربرداری لحظهای: اسکنرهای تکخطی بهصورت تدریجی حرکت میکنند و سرعت کمتری دارند، اما برای وظایف بسیار دقیق مانند بازرسی پرههای توربین ایدهآلاند.
- محدودیتهای سطحی: مواد بسیار بازتابنده یا شفاف (مانند شیشه) نور لیزر را پراکنده میکنند، که نیاز به پوششهای خاص یا حسگرهای جایگزین دارند.
کاربردهای صنعتی:
- تولید الکترونیک: بررسی اتصالات لحیمکاری روی بردهای مدار.
- باستانشناسی: ایجاد مدلهای سهبعدی از اشیای تاریخی بدون تماس فیزیکی.
3. زمان پرواز (ToF): ترکیب سرعت و سادگی
دوربینهای ToF زمان بازگشت نور منتشرشده را اندازهگیری میکنند و از فرمول زیر برای محاسبهی فاصله استفاده میکنند:
distance=speed of light×time2\text{distance} = \frac{\text{speed of light} \times \text{time}}{2}
ملاحظات فنی:
- مقاومت در برابر نور محیطی: فیلترهای پیشرفته از تداخل نور خورشید یا نور داخلی جلوگیری میکنند.
- خطاهای چندمسیره: انعکاس نور از سطوح متعدد میتواند خوانشها را مخدوش کند، که با سیگنالهای نوری مدولهشده قابل تصحیح است.
کاربردهای نوظهور:
- خردهفروشی: حسگرهای ToF در قفسههای هوشمند سطح موجودی را ردیابی میکنند.
- بازیهای ویدیویی: ضبط حرکات بلادرنگ برای تجربههای واقعیت مجازی.
نتیجهگیری: عصر جدید رباتیک هوشمند
پردازش تصویر سهبعدی فقط یک ارتقا نیست؛ بلکه کلید دستیابی به روباتهای خودکار و سازگار با محیط است. ترکیب فناوریهای حسگرهای عمقی و هوش مصنوعی، مرزهای تواناییهای انسانی و ماشینی را کمرنگتر کرده و آیندهای را رقم میزند که در آن رباتها نه فقط ابزار، بلکه همکارانی واقعی خواهند بود.





