راهنمای جامع و کاربردی کیتهای توسعه نرمافزار در بینایی ماشین (Machine Vision SDK)

مقدمه: وقتی ماشینها چشم باز میکنند! تا به حال به این فکر کردهاید که چگونه یک بازوی رباتیک در یک کارخانه داروسازی، با دقتی میلیمتری و سرعتی سرسامآور، شیشههای کوچک دارو را بررسی میکند تا…
مقدمه: وقتی ماشینها چشم باز میکنند!
تا به حال به این فکر کردهاید که چگونه یک بازوی رباتیک در یک کارخانه داروسازی، با دقتی میلیمتری و سرعتی سرسامآور، شیشههای کوچک دارو را بررسی میکند تا هیچکدام نقص نداشته باشند؟ یا چگونه خودروهای خودران میتوانند عابران پیاده، تابلوها و خطوط جاده را در کسری از ثانیه تشخیص دهند؟ پاسخ تمام این شگفتیها در دو کلمه خلاصه میشود: بینایی ماشین (Machine Vision).
اما ماشینها به خودی خود نمیتوانند ببینند. آنها فقط مجموعهای از فلز، سیلیکون و پلاستیک هستند. برای اینکه یک ماشین بتواند ببیند، ما به دو عنصر اساسی نیاز داریم:
- چشم (سختافزار): دوربینهای صنعتی پیشرفتهای که میتوانند تصاویر را با کیفیت و سرعت بالا ثبت کنند.
- مغز و سیستم عصبی (نرمافزار): کدهایی که این تصاویر خام را دریافت، پردازش و تفسیر میکنند.
اینجا دقیقاً همان نقطهای است که موضوع مقاله ما، یعنی Machine Vision SDK، وارد میدان میشود. SDK همان مترجمی است که زبان سختافزار (دوربین) را برای نرمافزار (برنامه شما) قابل فهم میکند. بیایید با دقت بیشتری به این مفهوم نگاه کنیم.
بخش اول: کیت توسعه نرمافزار (SDK) دقیقا چیست؟
قبل از اینکه به سراغ دوربینها برویم، بیایید مفهوم SDK را در دنیای نرمافزار بررسی کنیم. عبارت SDK مخفف Software Development Kit است.
تصور کنید میخواهید یک میز چوبی بسازید. شما میتوانید خودتان به جنگل بروید، درخت قطع کنید، الوار بسازید، میخها را در کوره ذوب آهن قالبگیری کنید و سپس میز را بسازید. اما این کار ماهها طول میکشد! راه حل هوشمندانهتر این است که به یک فروشگاه ابزارآلات بروید و یک جعبه ابزار آماده (شامل اره، چکش، میخ، چسب چوب و راهنمای ساخت) بخرید.
در دنیای برنامهنویسی، SDK همان جعبه ابزار است. وقتی یک شرکت (مثل باسلر) سختافزاری تولید میکند، یک SDK هم در کنار آن ارائه میدهد تا برنامهنویسان مجبور نباشند چرخ را از نو اختراع کنند.

اجزای اصلی یک SDK حرفهای چیست؟
وقتی شما SDK یک دوربین صنعتی را نصب میکنید، در واقع مجموعهای از ابزارهای زیر را در اختیار میگیرید:
- رابط برنامهنویسی اپلیکیشن (API): مجموعهای از دستورات و توابع آماده که به شما اجازه میدهد با دوربین صحبت کنید. مثلاً تابعی به نام
GrabImage()که با یک خط کد، تصویر را از دوربین میگیرد. - کتابخانهها (Libraries): کدهای از پیش نوشته شده و کامپایل شده (مانند فایلهای
.dllدر ویندوز یا.soدر لینوکس) که محاسبات سنگین و ارتباطات سطح پایین را مدیریت میکنند. - درایورها (Drivers): نرمافزارهای بسیار سطح پایینی که به سیستمعامل (ویندوز، لینوکس و…) میفهمانند که سختافزار متصل شده (از طریق USB یا کابل شبکه) دقیقا چیست و چگونه باید دادهها را از پورتها بخواند.
- مستندات (Documentation): دفترچه راهنمای جامع که به برنامهنویس میگوید هر تابع چه کاری انجام میدهد، چه پارامترهایی دریافت میکند و چه خطاهایی ممکن است رخ دهد.
- کدهای نمونه (Sample Codes): برنامههای کوچک و آمادهای که به زبانهای مختلف (C++, Python, C#) نوشته شدهاند تا شما بتوانید با الگوبرداری از آنها، پروژه خود را سریعتر شروع کنید.
بخش دوم: چرا در بینایی ماشین به SDK اختصاصی نیاز داریم؟
شاید بپرسید: من یک وبکم ساده دارم و با کتابخانه OpenCV و چند خط کد پایتون به راحتی از آن تصویر میگیرم. چرا برای دوربینهای صنعتی به SDKهای پیچیده نیاز است؟
این یک سوال بسیار عالی و هوشمندانه است! برای پاسخ به آن، باید تفاوت دنیای مصرفکننده (Consumer) و دنیای صنعت (Industrial) را درک کنیم.
تفاوت وبکم و دوربین صنعتی
وبکمها برای چت ویدئویی طراحی شدهاند. اگر فریم ریت (FPS) کمی افت کند یا نور تصویر به صورت خودکار تغییر کند، اتفاقی نمیافتد. اما در یک کارخانه تولید قطعات خودرو، اگر دوربینی که قطعات را با سرعت ۵۰ متر بر ثانیه بررسی میکند، حتی یک میلیثانیه تاخیر داشته باشد، ممکن است یک قطعه معیوب وارد بازار شود!
دوربینهای صنعتی (مانند محصولات Basler) دارای ویژگیهای فوقپیشرفتهای هستند که وبکمها از آنها بیبهرهاند:
- کنترل دقیق زمانبندی نوردهی (Exposure Time) در حد میکروثانیه.
- پشتیبانی از تریگرهای سختافزاری (Hardware Triggering)؛ یعنی دوربین دقیقاً در لحظهای که سنسور لیزری عبور یک قطعه را حس کرد، عکس بگیرد.
- فرمتهای پیکسلی خام و بدون فشردهسازی برای جلوگیری از افت کیفیت.
- مدیریت پهنای باند شبکه برای زمانی که دهها دوربین به صورت همزمان داده ارسال میکنند.
برای کنترل این ویژگیهای پیشرفته، ابزارهای ساده سیستمعامل کافی نیستند. ما به یک Machine Vision SDK نیاز داریم که به طور خاص برای مدیریت این پارامترهای حساس طراحی شده باشد.

بخش سوم: معماری و استانداردهای بینایی ماشین
یکی از جذابترین بخشهای مقالهای که معرفی کردید، اشاره به استانداردهاست. در گذشته، هر شرکتی دوربین خودش را با کابل مخصوص و نرمافزار انحصاری تولید میکرد. اگر شما میخواستید دوربین شرکت A را با دوربین شرکت B جایگزین کنید، باید کل کدهای نرمافزارتان را پاک میکردید و از نو مینوشتید! این یک کابوس برای مهندسان بود.
خوشبختانه، امروزه استانداردهای جهانی به وجود آمدهاند. یک SDK خوب (مانند نرمافزار pylon باسلر) باید از این استانداردها پشتیبانی کند:
۱. استاندارد GenICam (Generic Interface for Cameras)
این استاندارد، جامِ جهاننمای بینایی ماشین است! GenICam یک رابط برنامهنویسی یکسان برای تمام دوربینها تعریف میکند. فرقی نمیکند دوربین شما از طریق USB متصل شده باشد یا کابل شبکه (GigE)؛ با استفاده از GenICam، کدی که شما برای تنظیم روشنایی دوربین مینویسید، برای همه دوربینها یکسان خواهد بود.
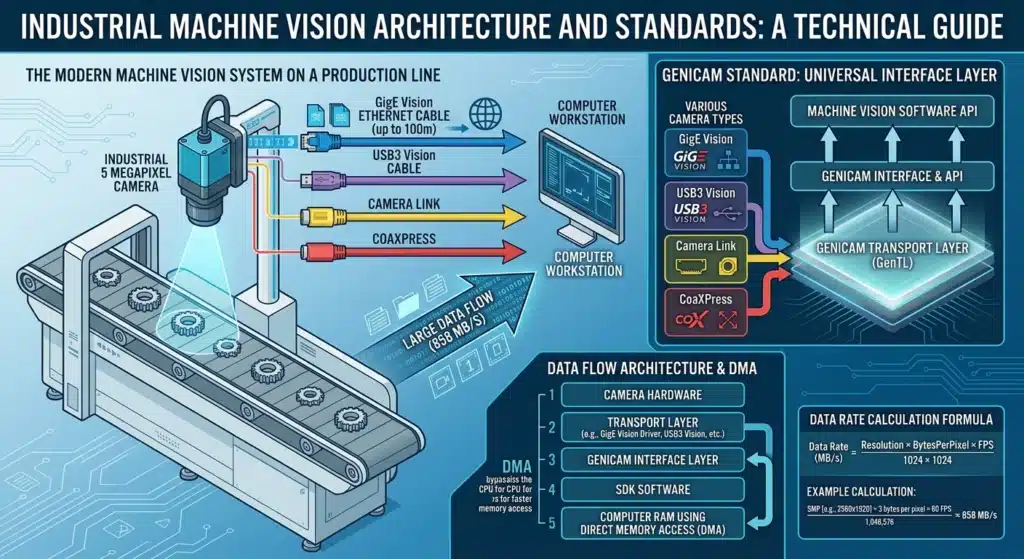
۲. استانداردهای انتقال داده (Transport Layers)
تصاویر صنعتی حجم بسیار بالایی دارند. اجازه بدهید با یک فرمول ریاضی ساده این موضوع را بررسی کنیم:
فرض کنید یک دوربین با رزولوشن ۵ مگاپیکسل داریم که تصاویر رنگی (۲۴ بیت یا ۳ بایت برای هر پیکسل) را با سرعت ۶۰ فریم بر ثانیه ثبت میکند. نرخ انتقال داده (Data Rate) چقدر خواهد بود؟
Data Rate = (Resolution × BytesPerPixel × FPS) / (1024 × 1024)
Data Rate = (5,000,000 × 3 × 60) / 1,048,576 ≈ 858 MB/s
انتقال ۸۵۸ مگابایت بر ثانیه داده خام، کار سادهای نیست! برای این کار استانداردهای سختافزاری و نرمافزاری خاصی توسعه یافتهاند:
- GigE Vision: برای انتقال تصویر روی کابلهای شبکه اترنت. مزیت این روش طول کابل بالا (تا ۱۰۰ متر) است.
- USB3 Vision: برای انتقال تصویر روی کابلهای USB 3.0. مزیت این روش پهنای باند بالا و تامین برق از طریق همان کابل است.
- Camera Link / CoaXPress: برای سرعتها و رزولوشنهای فوقالعاده بالا.
یک SDK قدرتمند، درایورهای بهینهشدهای برای این استانداردهای انتقال دارد تا بتواند بدون فشار آوردن به پردازنده سیستم (CPU)، تصاویر را مستقیماً به حافظه اصلی (RAM) منتقل کند. این تکنیک به نام Direct Memory Access (DMA) شناخته میشود.
![]()
بخش چهارم: نگاهی عمیق به نرمافزار pylon Camera Software Suite (شاهکار Basler)
حالا که مفاهیم پایه را با هم مرور کردیم، بیایید مستقیماً به سراغ محصولی برویم که شرکت باسلر در لینک شما به آن افتخار میکند: نرمافزار pylon.
pylon بسیار بیشتر از یک SDK ساده است. این مجموعه نرمافزاری، یک اکوسیستم کامل برای کار با دوربینهای بینایی ماشین است. وقتی شما pylon را نصب میکنید، چه چیزهایی به دست میآورید؟
۱. نرمافزار pylon Viewer (رابط گرافیکی کاربر)
قبل از اینکه حتی یک خط کد بنویسید، باسلر ابزاری به نام pylon Viewer در اختیار شما میگذارد. این یک نرمافزار گرافیکی است که به محض باز شدن، تمام دوربینهای متصل به سیستم شما را اسکن و پیدا میکند.
در این محیط، شما میتوانید:
- تصویر زنده دوربین را ببینید.
- تمام پارامترهای دوربین (مانند Exposure، Gain، White Balance، Frame Rate) را از طریق یک منوی درختی (Tree Menu) به سادگیِ چند کلیک تغییر دهید.
- هیستوگرام تصاویر را بررسی کنید تا از نورپردازی صحیح محیط مطمئن شوید.
- تنظیماتی که انجام دادهاید را در یک فایل ذخیره کنید (Configuration File) تا بعداً در کدهای برنامهنویسیتان مستقیماً آن فایل را بارگذاری کنید. این کار سرعت توسعه را به شدت افزایش میدهد!
۲. پشتیبانی بینظیر از زبانهای برنامهنویسی مختلف
یکی از جذابیتهای pylon، انعطافپذیری فوقالعاده آن است. فرقی نمیکند شما در چه حوزهای تخصص دارید، pylon با زبان شما صحبت میکند:
- ++C: برای بالاترین پرفورمنس و سیستمهای درنگزمان (Real-Time). بیشتر در کارخانههای اتوماسیون صنعتی استفاده میشود.
- #C : برای توسعه سریع نرمافزارهای تحت ویندوز با رابط کاربری گرافیکی زیبا (Windows Forms یا WPF).
- Python: گل سرسبد زبانهای امروزی! پایتون (از طریق پکیجی به نام
pypylon) بهترین گزینه برای کسانی است که میخواهند تصاویر را مستقیماً وارد شبکههای عصبی عمیق (Deep Learning)، کتابخانه OpenCV یا TensorFlow کنند. - C: برای سیستمهای امبدد (Embedded) بسیار قدیمی یا خاص.

۳. سازگاری با پلتفرمهای مختلف (Cross-Platform)
در گذشته، بینایی ماشین محدود به کامپیوترهای بزرگ ویندوزی بود. اما امروز داستان فرق کرده است. pylon به صورت کاملاً بومی روی سیستمعاملهای زیر اجرا میشود:
- ویندوز (Windows): بستر سنتی و قدرتمند نرمافزارهای صنعتی.
- لینوکس (Linux): بسیار محبوب برای توسعهدهندگان سیستمهای متنباز و سرورها.
- مکاواس (macOS): برای پژوهشگران و توسعهدهندگانی که از سختافزارهای اپل استفاده میکنند.
- سیستمهای نهفته (Embedded ARM): این شاید هیجانانگیزترین بخش باشد! شما میتوانید pylon را روی بردهای کوچکی مثل Raspberry Pi یا NVIDIA Jetson نصب کنید. این یعنی ساخت دوربینهای هوشمند و قابل حمل، پهپادهای خودران و رباتهای کوچک خانگی.
بخش پنجم: جادوی زیر پوسته (Under the Hood) – تصاویر چگونه ثبت میشوند؟
دوست من، بیایید کمی عمیقتر شویم و ببینیم وقتی در SDK دستور عکس بگیر را صادر میکنیم، در پشت صحنه چه اتفاقات پیچیدهای رخ میدهد. درک این مفاهیم، شما را از یک برنامهنویس ساده به یک متخصص بینایی ماشین تبدیل میکند.
استراتژیهای دریافت تصویر (Image Acquisition Strategies)
وقتی میخواهیم جریانی از تصاویر (مثلاً ۱۰۰ فریم در ثانیه) را از دوربین دریافت کنیم، مدیریت حافظه بسیار حیاتی است. SDK باسلر از مکانیزمی به نام حلقه بافر (Buffer Ring) استفاده میکند.
تصور کنید سه سینی خالی (بافر حافظه) در اختیار داریم:
- دوربین تصویر اول را میگیرد و در سینی شماره ۱ میگذارد.
- در حالی که نرمافزار شما در حال پردازش تصویرِ سینی شماره ۱ است، دوربین تصویر دوم را در سینی شماره ۲ قرار میدهد.
- اگر پردازش شما کند باشد، دوربین سینی ۳ را هم پر میکند.
- وقتی نرمافزار پردازش سینی ۱ را تمام کرد، آن سینی خالی میشود و دوباره در انتهای صف قرار میگیرد تا دوربین بتواند عکس جدیدی در آن بگذارد.
این استراتژی باعث میشود که حتی اگر پردازشگر شما برای چند میلیثانیه درگیر کار دیگری شد، هیچ تصویری از بین نرود (No Frame Drop).
حالتهای مختلف دریافت (Grabbing Modes)
در pylon SDK، شما میتوانید نحوه دریافت تصویر را شخصیسازی کنید:
- Grab One: فقط یک عکس میگیرد و تمام. (مناسب برای عکاسی تکی).
- Grab Continuous: دوربین به صورت مداوم و با حداکثر سرعت ممکن عکس میگیرد و به رم سیستم میفرستد. (مناسب برای پردازش ویدئو).
- Software Trigger: دوربین منتظر میماند تا شما در کد نرمافزار دستور
ExecuteSoftwareTrigger()را صدا بزنید، سپس یک عکس میگیرد. - Hardware Trigger: دوربین به یک سنسور خارجی (مثل سنسور نوری یا مجاورتی) وصل است. وقتی سنسور فعال شد، یک پالس الکتریکی به دوربین فرستاده میشود و دوربین در سطح سختافزار، بدون معطلی عکس میگیرد. این روش کمترین تاخیر (Latency) را دارد و در اتوماسیون صنعتی پادشاهی میکند.
بخش ششم: بیایید دست به کد شویم! (کدنویسی عملی با pypylon)
تئوری کافی است! به عنوان یک برنامهنویس، هیچچیز به اندازه دیدن کدهای واقعی لذتبخش نیست. بیایید با استفاده از زبان پایتون و کتابخانه pypylon، یک برنامه ساده اما اصولی برای اتصال به دوربین باسلر و دریافت تصویر بنویسیم.
ابتدا باید کتابخانه را نصب کنیم:
pip install pypylonfrom pypylon import pylon
import cv2
# قدم اول: ایجاد یک شیء از کلاس دوربین
# این دستور به صورت خودکار اولین دوربین متصل به سیستم را پیدا میکند
camera = pylon.InstantCamera(pylon.TlFactory.GetInstance().CreateFirstDevice())
# قدم دوم: باز کردن ارتباط با دوربین
camera.Open()
print("اتصال موفقیت آمیز بود!")
print("مدل دوربین متصل شده:", camera.GetDeviceInfo().GetModelName())
# قدم سوم: تنظیم برخی پارامترها (اختیاری اما مهم)
# مثلا تنظیم زمان نوردهی روی 5000 میکروثانیه
camera.ExposureTime.SetValue(5000.0)
# قدم چهارم: شروع فرآیند دریافت تصویر به صورت پیوسته
camera.StartGrabbing(pylon.GrabStrategy_LatestImageOnly)
converter = pylon.ImageFormatConverter()
# تبدیل فرمت تصویر به فرمت استاندارد BGR که در OpenCV استفاده میشود
converter.OutputPixelFormat = pylon.PixelType_BGR8packed
converter.OutputBitAlignment = pylon.OutputBitAlignment_MsbAligned
try:
while camera.IsGrabbing():
# منتظر ماندن برای دریافت یک فریم (حداکثر زمان انتظار 5000 میلیثانیه)
grabResult = camera.RetrieveResult(5000, pylon.TimeoutHandling_ThrowException)
# اگر تصویر با موفقیت ثبت شده باشد
if grabResult.GrabSucceeded():
# تبدیل بافر خام دوربین به یک آرایه قابل فهم برای OpenCV (Numpy Array)
image = converter.Convert(grabResult)
img_array = image.GetArray()
# نمایش تصویر در یک پنجره
cv2.imshow('Basler Camera Window', img_array)
# با فشردن کلید 'q' در صفحه کلید، از حلقه خارج میشویم
if cv2.waitKey(1) & 0xFF == ord('q'):
break
else:
print("خطا در ثبت فریم:", grabResult.ErrorCode, grabResult.ErrorDescription)
# آزاد کردن بافر فریم فعلی برای استفاده مجدد
grabResult.Release()
except Exception as e:
print("یک خطای غیرمنتظره رخ داد:", str(e))
finally:
# قدم پنجم: بستن اصولی دوربین و پنجرهها
camera.StopGrabbing()
camera.Close()
cv2.destroyAllWindows()
print("ارتباط با دوربین به درستی قطع شد.")
تحلیل کد بالا:
آیا متوجه شدید که کد بالا چقدر خوانا و منطقی است؟ این دقیقاً هنر یک SDK خوب است.
- شیء
InstantCameraتمام پیچیدگیهای اتصال به USB یا کابل شبکه را از ما پنهان میکند. - ما با یک خط کد ساده
camera.ExposureTime.SetValue(5000.0)یکی از حساسترین پارامترهای فیزیکی سنسور را تغییر دادیم. بدون SDK، برای این کار باید دهها خط کد برای ارسال سیگنالهای باینری به رجیسترهای دوربین مینوشتیم! - کلاس
ImageFormatConverterبه صورت هوشمندانه و با سرعت بالا، پیکسلهای خام (RAW) دوربین را به قالبی تبدیل میکند که کتابخانه محبوب OpenCV بتواند آن را پردازش کند. این پیوند بین pylon و OpenCV، راه را برای اجرای الگوریتمهای هوش مصنوعی باز میکند.
بخش هفتم: کاربردهای شگفتانگیز در دنیای واقعی
شاید از خودتان بپرسید: «خب، ما دوربین را وصل کردیم و با SDK کدهایش را نوشتیم. حالا این سیستم در دنیای واقعی چه دردی را دوا میکند؟»
بگذارید با چند مثال ملموس و شگفتانگیز، دامنه کاربرد این فناوری را برایتان روشن کنم.
۱. کارخانههای تولید نوشیدنی (تضمین کیفیت با سرعت نور)
تصور کنید یک خط تولید نوشابه با سرعت پر کردن ۲۰ بطری در ثانیه در حال حرکت است. آیا انسان میتواند با چشم بررسی کند که آیا درب همه بطریها محکم بسته شده و سطح مایع در همه آنها یکسان است؟ قطعا خیر.
در اینجا یک دوربین باسلر (کنترل شده توسط کدهای pylon) روی خط نصب میشود. هر بار که بطری از جلوی دوربین رد میشود، یک سنسور (تریگر سختافزاری) به دوربین فرمان عکسبرداری میدهد. نرمافزار تصویر را دریافت کرده، سطح مایع را با پردازش تصویر میسنجد و اگر درب بطری کج باشد، در کمتر از ۱۰ میلیثانیه به یک بازوی پنوماتیکی دستور میدهد تا آن بطری را از خط تولید بیرون بیندازد.
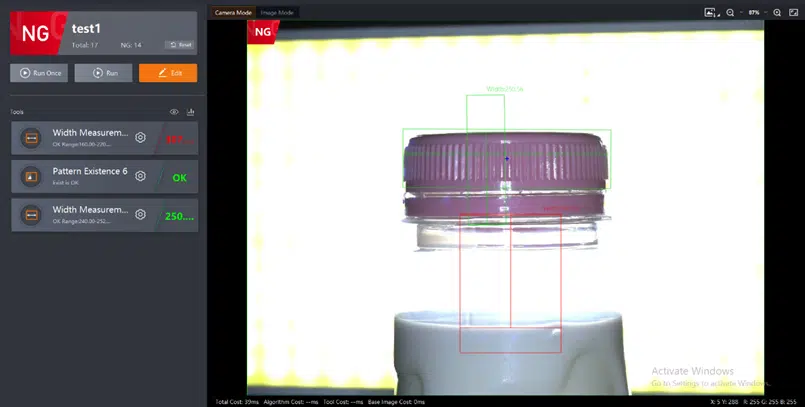
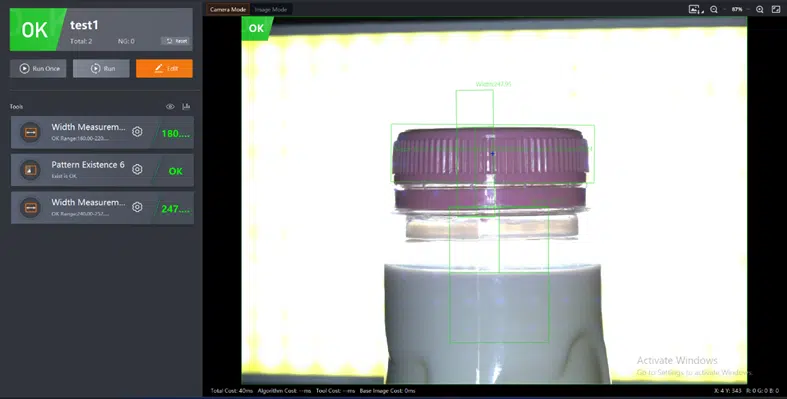
تصویربالا: نمونه واقعی از پروژه های انجام شده
۲. صنعت الکترونیک و نیمههادیها (بازرسی در مقیاس میکرون)
روی مادربرد کامپیوتر شما هزاران قطعه بسیار ریز (SMD) لحیم شدهاند. اگر فقط یک پایه از یک خازن میلیمتری درست لحیم نشده باشد، کل سیستم از کار میافتد. دوربینهای بینایی ماشین مجهز به لنزهای میکروسکوپی و رزولوشنهای خیرهکننده (مثل ۲۰ تا ۵۰ مگاپیکسل) از روی بردهای الکترونیکی عکس میگیرند. SDK این تصاویر عظیم را تکهتکه به نرمافزار پردازشی میفرستد تا با دقت میکرون، کیفیت لحیمکاریها بررسی شود.
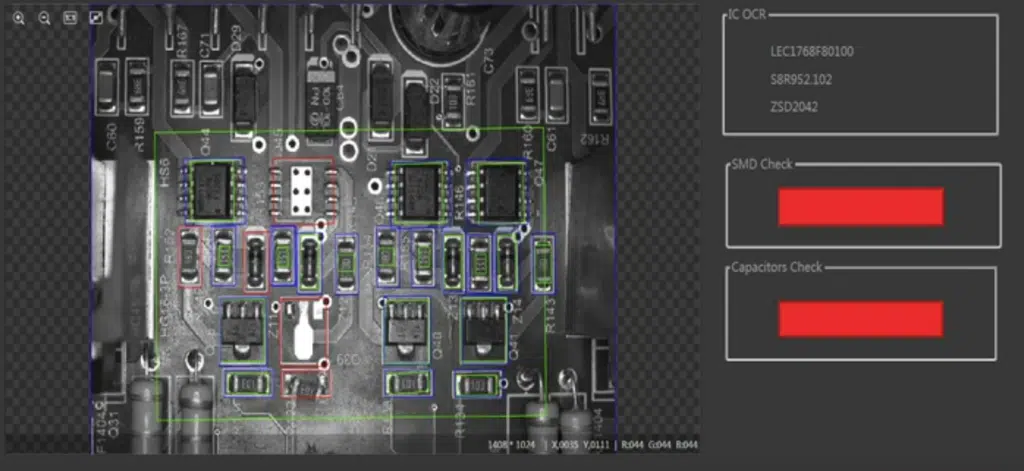
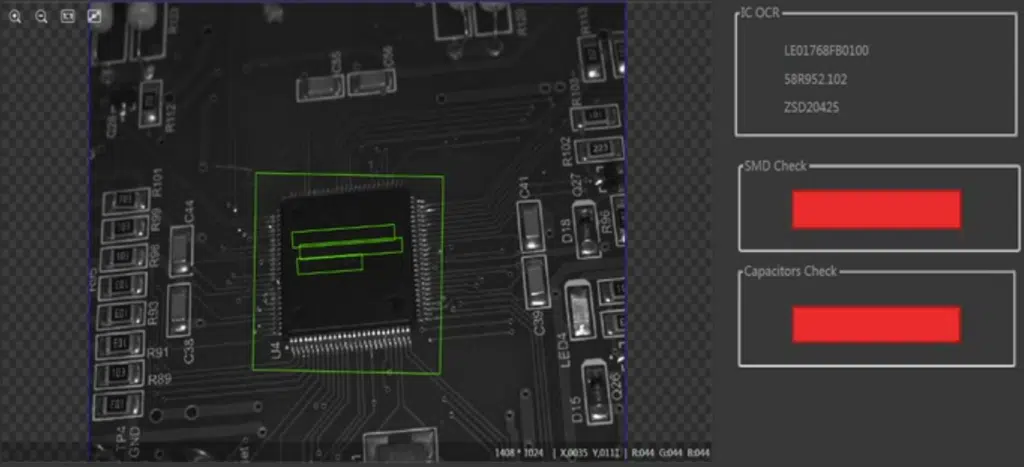
تصویربالا: نمونه واقعی از پروژه های انجام شده
۳. سیستمهای حمل و نقل هوشمند (ITS – Intelligent Transportation Systems)
دوربینهای کنترل سرعتی که در بزرگراهها میبینید، دقیقا از همین تکنولوژی استفاده میکنند. وقتی ماشینی با سرعت ۱۲۰ کیلومتر بر ساعت عبور میکند، ثبت یک تصویر واضح از پلاک آن نیازمند زمان نوردهی بسیار پایین (مثلا ۵۰ میکروثانیه) است. کدهای نوشته شده با pylon به دوربین دستور میدهند که فلش مادون قرمز (IR) را دقیقا با شاتر دوربین سینک (Sync) کند تا پلاک ماشین حتی در تاریکی مطلق شب با وضوح کامل ثبت شده و توسط الگوریتمهای ANPR (تشخیص پلاک) خوانده شود.
۴. پزشکی و علوم زیستی
در آزمایشگاههای پاتولوژی، دستگاههای خودکار اسلاید خون را زیر میکروسکوپ قرار میدهند. دوربینهای رنگی فوقالعاده دقیق باسلر از این سلولها تصویربرداری میکنند و SDK تصاویر را به نرمافزارهای هوش مصنوعی تحویل میدهد تا سلولهای سرطانی را در میان میلیونها سلول سالم تشخیص دهند. در اینجا، دقت رنگها (Color Fidelity) که توسط SDK مدیریت میشود، مرز بین مرگ و زندگی است.

بخش هشتم: ترکیب SDK باسلر با هوش مصنوعی و یادگیری عمیق (Deep Learning)
دوستان عزیزم، ما در عصر هوش مصنوعی زندگی میکنیم و دنیای بینایی ماشین نیز از این قاعده مستثنی نیست. رویکرد سنتی بینایی ماشین بر اساس قوانین ریاضی بود (مثلا: اگر تعداد پیکسلهای سیاه بیشتر از ۵۰ بود، پس قطعه خراب است). اما با ورود شبکههای عصبی پیچیده (CNNها) همهچیز تغییر کرده است.
شرکتهایی مانند Basler به خوبی این روند را درک کردهاند. به همین دلیل، SDK آنها (pylon) بهگونهای بهینهسازی شده که بتواند به صورت مستقیم (Direct Memory Transfer) با پردازندههای گرافیکی (GPU) و واحدهای پردازش تنسور (TPU) ارتباط برقرار کند.
شما امروزه میتوانید کدهایی بنویسید که تصویر خام توسط pypylon دریافت شود و در همان کسر از ثانیه، به یک مدل آموزشدیده در PyTorch یا TensorFlow خورانده شود. مثلاً سیستمی بسازید که دوربین روی یک نوار نقاله زباله قرار گیرد و هوش مصنوعی با دریافت تصاویر از SDK، زبالههای پلاستیکی، شیشهای و کاغذی را از هم تشخیص داده و بازوهای رباتیک را برای تفکیک آنها هدایت کند. این ادغام بینقص سختافزار، SDK و AI، آینده صنعت را رقم میزند.

بخش نهم: نکات طلایی برای توسعهدهندگان
اگر با مطالعه این مقاله به حوزه برنامهنویسی بینایی ماشین علاقهمند شدهاید، به عنوان کسی که این مسیر را بررسی کرده است، چند نکته کاربردی و مهم را پیشنهاد میکنم که هنگام کار با SDKهایی مانند pylon بهتر است همیشه در نظر داشته باشید:
مدیریت استثناها (Exception Handling)
در محیطهای صنعتی، شرایط همیشه پایدار و قابل پیشبینی نیست. ممکن است کابلها بهطور ناگهانی جدا شوند، نویز ناشی از الکتروموتورها باعث اختلال در ارتباط USB شود، یا مشکلات سختافزاری دیگری رخ دهد. به همین دلیل، برنامههای شما نباید در مواجهه با چنین اتفاقاتی از کار بیفتند. همیشه از سازوکارهای مدیریت خطا مانند بلوکهای try-catch (یا try-except در پایتون) استفاده کنید و خطاهایی مانند pylon.GenericException را بهدرستی مدیریت نمایید. همچنین بهتر است مکانیزمی برای تلاش مجدد جهت اتصال (Reconnect) در برنامه خود در نظر بگیرید.
استفاده از سیستم رویدادها (Events)
به جای استفاده از حلقههای بینهایت برای بررسی مداوم آماده شدن تصویر (Polling)، بهتر است از معماری مبتنی بر رویداد (Event-Driven) که در نرمافزار pylon ارائه شده استفاده کنید. در این روش، شما به دوربین اعلام میکنید که هنگام آماده شدن تصویر، تابع مشخصی (Callback) را فراخوانی کند. این رویکرد باعث کاهش مصرف CPU، افزایش کارایی برنامه و طراحی تمیزتر کد میشود.
بهینهسازی پهنای باند شبکه
اگر از دوربینهای GigE (دوربینهای مبتنی بر شبکه) استفاده میکنید و چند دوربین را به یک سوئیچ شبکه متصل کردهاید، مدیریت صحیح پهنای باند اهمیت بسیار زیادی پیدا میکند. در چنین شرایطی بهتر است پارامتر Inter-Packet Delay را در SDK تنظیم کنید تا ارسال بستههای داده از دوربینها با یکدیگر تداخل نداشته باشد و از بروز Packet Collision جلوگیری شود.
استفاده از شبیهساز دوربین (Camera Emulator)
یکی از قابلیتهای بسیار ارزشمند pylon وجود شبیهساز دوربین است. این ابزار به شما اجازه میدهد دوربینهای مجازی ایجاد کنید. بنابراین حتی اگر در حال حاضر به دوربین سختافزاری باسلر دسترسی ندارید، میتوانید با استفاده از این شبیهساز تصاویر آزمایشی تولید کرده و تمام بخشهای نرمافزار خود را توسعه داده و تست کنید.
نتیجهگیری: دریچهای به سوی آینده اتوماسیون
در پایان این مسیر آموزشی، میتوان گفت که یک مقاله ساده درباره Machine Vision SDK در وبسایت Basler در واقع دریچهای به دنیایی از فناوریهای پیشرفته است.
کیتهای توسعه نرمافزار (SDK) مانند pylon صرفاً مجموعهای از توابع و کتابخانهها نیستند؛ بلکه پلی قدرتمند میان دنیای فیزیکی (نور، لنز و سنسورها) و دنیای دیجیتال (دادهها، الگوریتمها و پردازش تصویر) ایجاد میکنند. این ابزارها به ما اجازه میدهند با مدیریت دقیق سنسورها، پهنای باند، حافظه و جریان داده، سیستمهایی طراحی کنیم که در بسیاری از موارد از توانایی بینایی انسان نیز فراتر میروند.
امروزه از خطوط تولید پیشرفته در کارخانههای صنعتی گرفته تا میکروسکوپهای پزشکی، سیستمهای کنترل کیفیت و حتی خودروهای هوشمند آینده، همگی به همکاری دقیق میان سختافزارهای تصویربرداری و نرمافزارهای هوشمند وابسته هستند.
دنیای بینایی ماشین سرشار از فرصتهای جذاب برای نوآوری و توسعه فناوری است. امیدوارم این مقاله توانسته باشد کنجکاوی شما را برانگیزد و شما را ترغیب کند تا خودتان نیز وارد این حوزه شوید، کتابخانه pypylon را نصب کنید و اولین پروژه بینایی ماشین خود را آغاز نمایید.
اگر درباره هر بخش از این مقاله — از مثالهای برنامهنویسی پایتون گرفته تا مفاهیم بافرینگ، ارتباط دوربینها یا استانداردهای صنعتی — سوالی دارید، خوشحال میشوم آن را در بخش نظرات مطرح کنید تا با هم بیشتر درباره آن گفتگو کنیم.
برای شما آرزوی موفقیت، خلاقیت و کشفهای هیجانانگیز در دنیای بینایی ماشین دارم
کیت توسعه نرمافزار یا SDK، در واقع یک پل ارتباطی قدرتمند بین سختافزار (دوربین صنعتی) و نرمافزار (کد شما) است. این جعبهابزار به شما اجازه میدهد به جای درگیری با کدهای پیچیده و سطح پایینِ سختافزاری، با چند خط کد ساده به دوربین دستور بدهید، تنظیمات نوردهی را تغییر دهید و تصاویر خام را با بالاترین سرعت و بدون افت کیفیت دریافت کنید.
وبکمها برای تماسهای ویدیویی طراحی شدهاند و تصاویر را فشرده میکنند که باعث از دست رفتن جزئیات میشود. اما دوربینهای صنعتی همراه با SDK اختصاصیشان، تصاویر را کاملاً خام (Raw)، بدون فشردهسازی و با زمانبندی میکروثانیهای ارسال میکنند. برای کارهای دقیقی مثل کنترل کیفیت در خط تولید که قطعات با سرعت در حرکتاند، وبکمها کاملاً ناتوان هستند.
نرمافزار pylon یکی از پایدارترین و سبکترین SDKهای موجود در صنعت بینایی ماشین است. ویژگی بارز آن، مصرف بسیار پایین منابع پردازشی (CPU و RAM) سیستم است. همچنین این نرمافزار با داشتن یک رابط کاربری گرافیکی عالی (pylon Viewer) به شما اجازه میدهد قبل از کدنویسی، تمام پارامترهای دوربین را به صورت بصری تست و تنظیم کنید.
خبر خوب این است که pylon دست شما را کاملاً باز گذاشته است! شما میتوانید از زبانهای قدرتمندی مثل ++C و #C برای نرمافزارهای صنعتی استفاده کنید. همچنین اگر به برنامهنویسی سریع یا هوش مصنوعی علاقهمندید، کتابخانه قدرتمند pypylon به شما اجازه میدهد به راحتی با زبان پایتون (Python) دوربینها را کنترل کنید.
کلمه GenICam مخفف رابط عمومی برای دوربینها (Generic Interface for Cameras) است. این استاندارد جهانی باعث میشود تا نحوه برنامهنویسی برای یک دوربین شبکه (GigE) با یک دوربین USB3 هیچ تفاوتی نداشته باشد. در واقع GenICam یک زبان مشترک است که یادگیری SDK را بسیار سادهتر و یکپارچهتر میکند.
بله، کاملاً! نرمافزار pylon از معماری ARM و سیستمعامل لینوکس پشتیبانی میکند. این یعنی شما میتوانید پروژههای پردازش تصویر و هوش مصنوعی خود را روی بردهای توکار (Embedded) مانند Raspberry Pi یا NVIDIA Jetson پیادهسازی کنید که برای ساخت سیستمهای قابل حمل و جمعوجور فوقالعاده است.
تریگر نرمافزاری دستوری است که از طریق کد شما در شبکه یا کابل USB ارسال میشود و ممکن است چند میلیثانیه تاخیر داشته باشد. اما تریگر سختافزاری یک پالس الکتریکی مستقیم (مثلاً از یک سنسور نوری روی ریل کارخانه) به کابل I/O دوربین است. این روش تاخیر را به صفر میرساند و عکسبرداری را در کسری از ثانیه با دقت بینظیری همگامسازی میکند.
این کار با پایتون بسیار جذاب و راحت است! وقتی تصویری را توسط pypylon دریافت میکنید، میتوانید آن را به صورت مستقیم به یک آرایه نامپای (NumPy Array) تبدیل کنید. از اینجا به بعد، تصویر شما آماده است تا وارد کتابخانه OpenCV شود یا به عنوان ورودی به شبکههای عصبی عمیق (Deep Learning) در TensorFlow یا PyTorch داده شود.
افت فریم معمولاً به دلیل پر شدن پهنای باند شبکه رخ میدهد. بهترین روشها در SDK این است که قابلیت Jumbo Frames را در کارت شبکه خود فعال کنید و همچنین پارامتری به نام Inter-Packet Delay را در تنظیمات دوربین افزایش دهید تا دادهها با فاصلههای زمانی منظمتری ارسال شوند و سوئیچ شبکه دچار اختلال نشود.
بله، صد در صد! یکی از جذابترین امکانات SDK باسلر، وجود شبیهساز دوربین (Camera Emulator) است. شما میتوانید تا ۲۵۶ دوربین مجازی در سیستم خود بسازید، کدهای دریافت تصویر و تریگر را روی آنها بنویسید و تمام الگوریتمهای خود را تست کنید؛ بدون اینکه حتی یک ریال برای خرید تجهیزات سختافزاری هزینه کرده باشید!





