بینایی تعبیهشده برای پلتفرم NVIDIA Jetson با دوربینهای Basler

مقدمه: طلوع عصر بینایی ماشین در لبه (Edge) در دنیای امروز که هوش مصنوعی (AI) و یادگیری عمیق (Deep Learning) به هسته اصلی نوآوری تبدیل شدهاند، نیاز به پردازش بلادرنگ (Real-time Processing) دادههای بصری در…
مقدمه: طلوع عصر بینایی ماشین در لبه (Edge)
در دنیای امروز که هوش مصنوعی (AI) و یادگیری عمیق (Deep Learning) به هسته اصلی نوآوری تبدیل شدهاند، نیاز به پردازش بلادرنگ (Real-time Processing) دادههای بصری در محیطهای عملیاتی (Operational Environments) به شدت افزایش یافته است. این نیاز، مفهوم بینایی ماشین در لبه (Edge AI Vision) را به یک ضرورت تبدیل کرده است. بینایی تعبیهشده (Embedded Vision)، که شاخهای حیاتی از بینایی ماشین است، بر پیادهسازی سیستمهای هوشمند تصویربرداری در دستگاههای کوچک، کممصرف و مستقل تمرکز دارد.
در این میان، پلتفرمهای محاسباتی کممصرف و قدرتمند، مانند سری NVIDIA Jetson، به دلیل ترکیب بینظیر CPUهای چند هستهای و واحدهای پردازش گرافیکی (GPU) برای تسریع محاسبات هوش مصنوعی، به ستون فقرات این انقلاب تبدیل شدهاند. با این حال، قدرت پردازشی تنها نیمی از معادله است؛ برای استخراج اطلاعات معنیدار از دنیای فیزیکی، به سختافزار تصویربرداری قابل اعتماد و با کیفیت نیاز داریم. اینجا است که نقش شرکتهایی مانند Basler، پیشرو در صنعت دوربینهای صنعتی، برجسته میشود.
هدف این پست وبلاگ جامع، کاوش عمیق در دنیای ادغام بینایی تعبیهشده، با تمرکز ویژه بر همافزایی قدرتمند بین پلتفرم NVIDIA Jetson و ماژولها و دوربینهای پیشرفته Basler است. ما مروری خواهیم داشت بر معماری Jetson، قابلیتهای دوربینهای Basler، و چگونگی استفاده از این ترکیب برای ساخت نسل بعدی سیستمهای بینایی هوشمند در کاربردهایی نظیر رباتیک، اتوماسیون صنعتی و خودروهای خودران.
۱. مروری بر پلتفرم NVIDIA Jetson: قلب تپنده هوش مصنوعی در لبه
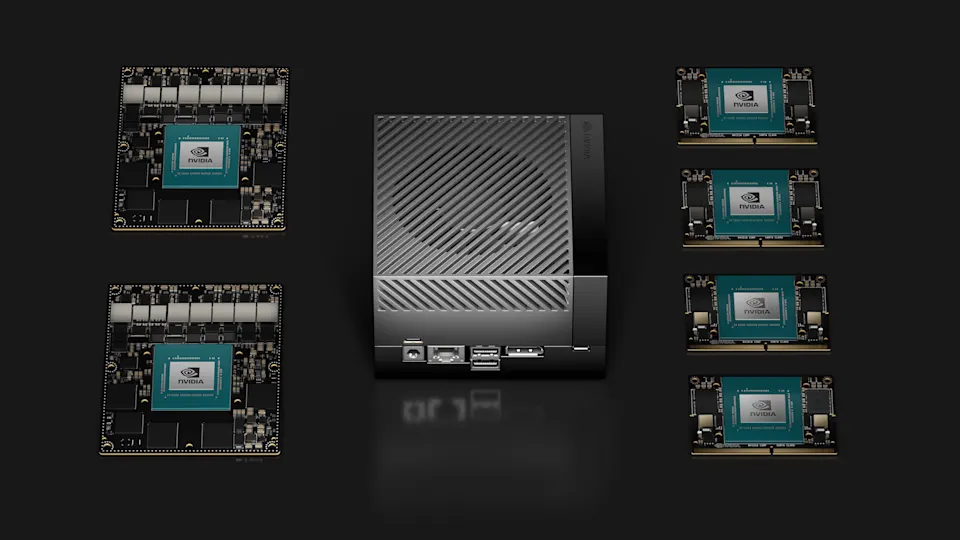
NVIDIA Jetson یک خانواده از سیستمهای روی تراشه (SoC) است که به طور خاص برای محاسبات هوش مصنوعی در لبه طراحی شدهاند. این پلتفرمها برخلاف واحدهای پردازش گرافیکی دسکتاپ (مانند سری GeForce) یا سرورها (مانند سری A100/H100)، تعادلی بهینه بین عملکرد، مصرف انرژی و اندازه فیزیکی برقرار میکنند.
۱.۱. تاریخچه و تحول معماری
شروع مسیر Jetson با معرفی اولین مدلها بود که از معماریهای قدیمیتر NVIDIA استفاده میکردند. اما نقطه عطف اصلی، معرفی معماریهای مبتنی بر CUDA و سپس گذار به هستههای Tensor (Tensor Cores) بود که برای تسریع عملیات ماتریسی در شبکههای عصبی عمیق ضروری هستند.
معماریهای کلیدی:
-
Tegra X1 (Jetson TX1): اولین پلتفرمی که قابلیتهای GPU پیشرفته را به فرم فاکتور کوچک آورد.
-
Pascal (Jetson TX2): بهبود چشمگیر در کارایی نسبت به مصرف انرژی.
-
Volta (Jetson AGX Xavier): معرفی هستههای تنسور اختصاصی، که جهشی بزرگ در توانایی اجرای مدلهای بزرگ هوش مصنوعی در لبه بود.
-
Ampere (Jetson AGX Orin): جدیدترین و قدرتمندترین نسل، که کارایی هوش مصنوعی را تا چندین برابر نسبت به نسلهای قبلی افزایش داده و از قابلیتهای پیشرفتهای مانند واحدهای پردازش بینایی (NVDLA) بهره میبرد.
۱.۲. معماری SoC و قابلیتهای AI
سختافزار Jetson بر اساس یک رویکرد ترکیبی (Heterogeneous Computing) بنا شده است:
-
CPU Cluster (مانند NVIDIA Carmel): مسئول اجرای سیستمعامل (معمولاً لینوکس مبتنی بر Ubuntu) و عملیات کنترلی و سریال.
-
GPU (بر پایه معماریهای پیشرفته NVIDIA): هسته اصلی برای اجرای موازی الگوریتمهای یادگیری عمیق، پردازش تصویر و عملیات محاسباتی سنگین.
-
Deep Learning Accelerator (DLA): هستههای اختصاصی (مانند NVDLA در Orin) که برای اجرای استنتاج (Inference) شبکه عصبی با کمترین مصرف انرژی بهینهسازی شدهاند.
-
Vision Processors (PVA در Xavier/Orin): واحدهای سختافزاری برای پردازش بلادرنگ دادههای حسگرها، مانند پردازشهای اولیه تصویر (ISP) یا الگوریتمهای SLAM.
این ترکیب سختافزاری به توسعهدهندگان این امکان را میدهد که مدلهای آموزشدیده بر روی پلتفرمهای ابری (مانند مراکز داده با Tesla GPUs) را با استفاده از ابزارهایی مانند TensorRT، به طور مؤثر به لبه منتقل کرده و با سرعتی در حدود چندین TOPS (تریلیون عملیات در ثانیه) اجرا کنند.
۱.۳. خانوادههای محصولات Jetson
خانواده Jetson سه دسته اصلی را پوشش میدهد:
-
Jetson Nano/Orin Nano: برای پروژههای کوچکتر، آموزش و کاربردهای کممصرف.
-
Jetson Xavier NX/Orin NX: تعادل بین عملکرد و اندازه برای کاربردهای نیمه حرفهای و رباتیک متوسط.
-
Jetson AGX Xavier/AGX Orin: بالاترین سطح عملکرد برای سیستمهای پیشرفته که نیاز به پردازش چندین جریان ویدئویی با وضوح بالا (High-Resolution) و تأخیر کم (Low Latency) دارند.
این انعطافپذیری در انتخاب پلتفرم، توسعهدهندگان را قادر میسازد تا به طور دقیق منابع مورد نیاز سختافزاری را با الزامات کاربردی خود هماهنگ سازند.
۲. معرفی Basler: استاندارد طلایی در بینایی صنعتی
Basler AG، که دفتر مرکزی آن در شهر آهلن، آلمان واقع شده است، بیش از سه دهه است که به عنوان یکی از پیشگامان جهانی در زمینه فناوریهای تصویربرداری صنعتی شناخته میشود. تمرکز اصلی این شرکت بر تولید دوربینها، لنزها و اجزای نرمافزاری با کیفیت فوقالعاده بالا و قابلیت اطمینان در محیطهای سخت صنعتی است.
۲.۱. فلسفه کیفیت و دقت Basler
در حالی که بسیاری از دوربینهای مصرفی برای بازار گسترده طراحی شدهاند، دوربینهای Basler برای دوام، دقت رنگ (Color Fidelity)، نرخ فریم بالا (High Frame Rate) و تأخیر ناچیز (Minimal Latency) بهینهسازی شدهاند. این امر در صنایعی مانند بازرسی نوری خودکار (AOI) و کنترل کیفیت حیاتی است.
ویژگیهای متمایز کننده دوربینهای Basler:
-
Sensors با کیفیت برتر: استفاده از سنسورهای CMOS پیشرو از تولیدکنندگان بزرگ (مانند Sony) که اغلب دارای ویژگیهایی نظیر Global Shutter (برای جلوگیری از اعوجاج تصویر در حرکت سریع) هستند.
-
استانداردهای صنعتی (Industrial Standards): محصولات Basler از رابطهای استاندارد صنعتی مانند GigE Vision و USB3 Vision پشتیبانی میکنند، اما برای کاربردهای تعبیهشده، راهحلهای تخصصیتری ارائه میدهند.
-
قابلیت اطمینان (Reliability): طراحی شده برای کارکرد ۲۴/۷ در شرایط سخت محیطی (دما، لرزش و گرد و غبار).
۲.۲. راهحلهای اختصاصی برای بینایی تعبیهشده: BCON و ماژولهای OEM
برای اینکه دوربینهای صنعتی به طور مؤثر در سیستمهای تعبیهشده مانند Jetson ادغام شوند، نیاز به رابطهایی فراتر از اتصالات استاندارد دسکتاپ است. Basler این نیاز را با دو راهحل اصلی پاسخ داده است:
الف) رابط BCON (Basler Camera Interface)
BCON یک رابط اختصاصی است که توسط Basler برای برآورده کردن الزامات بینایی تعبیهشده توسعه یافته است. این رابط، که از کابلهای ارزانتر و سبکتر استفاده میکند، یک اتصال مستقیم بین سنسور دوربین و پردازنده میزبان (Host Processor) فراهم میآورد.
مزایای BCON:
-
انتقال داده با کارایی بالا: BCON از پیوندهای سریالی سریع برای انتقال دادههای خام تصویر (Raw Image Data) استفاده میکند.
-
کاهش سربار (Overhead): با دور زدن لایههای پروتکلی پیچیده مانند GigE، تأخیر کاهش یافته و مصرف منابع CPU کمتر میشود.
-
انعطافپذیری فرم فاکتور: این رابط امکان طراحی دوربینهایی با اندازههای بسیار کوچک (مانند ماژولهای Board-Level Camera) را فراهم میآورد که برای ادغام در فضاهای محدود حیاتی است.

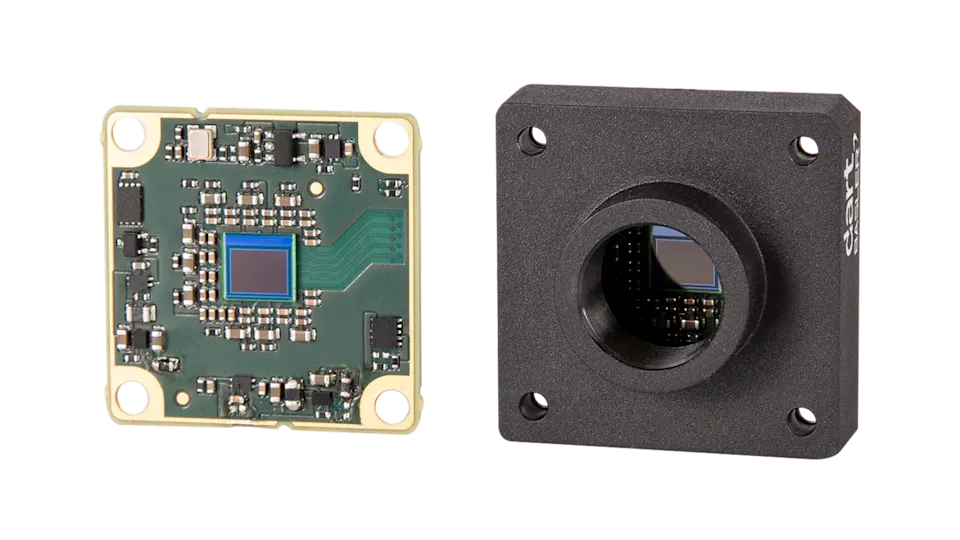
ب) ماژولهای دوربین ناحیه-مبنا (Area-Scan Camera Modules)
Basler دوربینهایی را عرضه میکند که به جای داشتن محفظه کامل دوربین، به صورت ماژولهای PCB (برد مدار چاپی) عرضه میشوند. این ماژولها شامل سنسور، مدارات پردازش اولیه و رابط BCON هستند و مستقیماً به برد توسعهدهنده (Development Kit) میزبان متصل میشوند. این رویکرد به مهندسان اجازه میدهد تا دوربین را دقیقا در جایی که نیاز است، جاسازی کنند.
۳. ادغام Basler با NVIDIA Jetson: همافزایی قدرت و کیفیت
موفقیت یک سیستم بینایی تعبیهشده به نحوه همکاری مؤثر سختافزار تصویربرداری و سختافزار پردازشی بستگی دارد. ترکیب Basler و Jetson یک استراتژی رایج در میان توسعهدهندگانی است که به دنبال عملکرد بالا و تأخیر پایین هستند.
۳.۱. چالشهای رابط (Interface Challenges)
در حالی که Jetson پلتفرم ایدهآلی برای اجرای مدلهای AI است، چالش اصلی این است که دادههای حجیم تصویر را با بالاترین سرعت و کمترین تأخیر، از دوربین به حافظه اصلی (RAM) متصل به GPU منتقل کنیم.
دوربینهای صنعتی استاندارد اغلب از رابطهایی مانند GigE Vision یا USB3 Vision استفاده میکنند. این رابطها دارای سربار نرمافزاری و سختافزاری قابل توجهی برای مدیریت پشته پروتکل هستند. این سربار، زمان و منابعی از CPU را مصرف میکند که میتوانستند صرف اجرای مدلهای یادگیری عمیق شوند.
۳.۲. راهحل کلیدی: BCON به Jetson
ادغام اصلی زمانی بهینه میشود که دوربینهای Basler مجهز به رابط BCON (یا نسخه مبتنی بر MIPI-CSI2) به پلتفرم Jetson متصل شوند.
نقش پلتفرم Jetson:
Jetson دارای رابطهای سختافزاری داخلی است که به طور خاص برای دریافت دادههای حسگر طراحی شدهاند:
-
MIPI-CSI2 (Camera Serial Interface 2): این رابط یک استاندارد صنعتی برای اتصال سریع سنسورهای تصویر و دوربینها به پردازندههای میزبان است. این رابط دارای پهنای باند بالا و تأخیر بسیار پایینی است، زیرا مستقیماً از طریق مسیرهای سختافزاری (Hardware Lanes) به پردازندههای سیگنال تصویر (ISP) یا مستقیماً به هستههای GPU متصل میشود.
همکاری سختافزاری:
Basler با طراحی ماژولهای BCON که سازگار با MIPI-CSI2 هستند، اجازه میدهد تا جریان داده خام تصویر (Raw Data) مستقیماً از دوربین به NVIDIA ISP یا CUDA Cores منتقل شود. این امر به دو دلیل مهم است:
-
کاهش مصرف CPU: از آنجا که دادهها نیازی به پردازش مجدد توسط پشته شبکه یا USB ندارند، CPU آزاد میشود.
-
Pipeline بهینهسازی شده: دادهها میتوانند بلافاصله پس از ورود به سیستم، وارد مراحل پردازش GPU (مانند کاهش نویز یا تبدیل رنگ) شوند، که برای الگوریتمهایی مانند SLAM یا تشخیص اشیاء با نرخ فریم بالا حیاتی است.
۳.۳. نرمافزار و درایورها: Basler pylon و JetPack
برای استفاده از این ادغام، Basler مجموعه نرمافزاری خود به نام pylon Camera Software Suite را ارائه میدهد.
-
pylon در محیط لینوکس (Jetson): این نرمافزار ابزارهای لازم برای پیکربندی، کنترل پارامترهای دوربین (مانند نوردهی، بهره) و دریافت تصاویر را فراهم میکند.
-
سازگاری با NVIDIA JetPack: Basler اطمینان حاصل میکند که درایورها و کتابخانههای pylon برای اجرای بومی (Native) بر روی پلتفرم Jetson و سیستمعامل لینوکس مبتنی بر JetPack بهینه شدهاند. این امر تضمین میکند که APIهای سطح بالا برای دسترسی به تصاویر، با محیط نرمافزاری NVIDIA (مانند DeepStream و CUDA) به خوبی کار کنند.
DeepStream SDK: توسعهدهندگان میتوانند از قابلیتهای بومی DeepStream برای ساخت خطوط لوله (Pipelines) بینایی استفاده کنند. در این خطوط لوله، تصاویر Basler مستقیماً به عنوان ورودی به استخرهای حافظه بهینهسازی شده توسط GPU فرستاده میشوند، جایی که توسط مدلهای TensorRT اجرا شده و پردازش میشوند.
۴. کاربردهای عملی: جایی که هوش در لبه متولد میشود
ادغام دوربینهای با کیفیت صنعتی Basler با قدرت پردازشی Jetson، امکان توسعه سیستمهایی را فراهم میکند که پیشتر فقط در محیطهای سرور ممکن بود. این سیستمها در حال حاضر در صنایع مختلف انقلابی ایجاد کردهاند.
۴.۱. رباتیک و اتوماسیون صنعتی (Industry 4.0)
در محیطهای تولیدی، رباتها باید بتوانند اشیاء مختلف را با سرعت بالا شناسایی، مکانیابی و دستکاری کنند (Pick-and-Place).
-
رباتهای همکار (Cobots): نیاز به درک فضایی دقیق و ایمن از محیط اطراف انسانها دارند. Jetson Xavier NX به همراه دوربینهای Basler میتواند دید استریو (Stereo Vision) با تأخیر پایین را برای نقشهبرداری سهبعدی (3D Mapping) فراهم کند.
-
بازرسی کیفیت (Quality Inspection): با استفاده از دوربینهای رزولوشن بالا (مانند مدلهای Basler ace 2 Pro با سنسورهای خاص)، Jetson میتواند در همان لحظه که قطعه تولید میشود، نقصهای میکرو یا تغییرات رنگی را با استفاده از شبکههای کانولوشنی (CNNs) تشخیص دهد. استفاده از Global Shutter برای اطمینان از وضوح تصویر در حین حرکت سریع خط تولید، حیاتی است.
۴.۲. صنعت خودرو و سامانههای کمکراننده (ADAS)
اگرچه خودروهای خودران اغلب به سختافزارهای قویتری نیاز دارند، سیستمهای ADAS سطح پایینتر و همچنین تست و اعتبارسنجی سامانههای پیشرفتهتر، به پلتفرمهای لبهمحور متکی هستند.
-
نظارت بر راننده (Driver Monitoring Systems – DMS): با استفاده از دوربینهای مادون قرمز (IR) یا دوربینهای RGB با کیفیت بالا، Jetson میتواند حالت خستگی، حواسپرتی یا عدم تمرکز راننده را تشخیص دهد. Basler ماژولهایی با حساسیت بالا در طیفهای مختلف نوری ارائه میدهد که برای این کاربردها ایدهآل هستند.
-
پردازش چند حسگری (Multi-Sensor Fusion): Jetson AGX Orin میتواند دادههای ویدئویی Basler را با دادههای رادار و لایدار ترکیب کند تا یک مدل محیطی جامع و قوی ایجاد نماید.
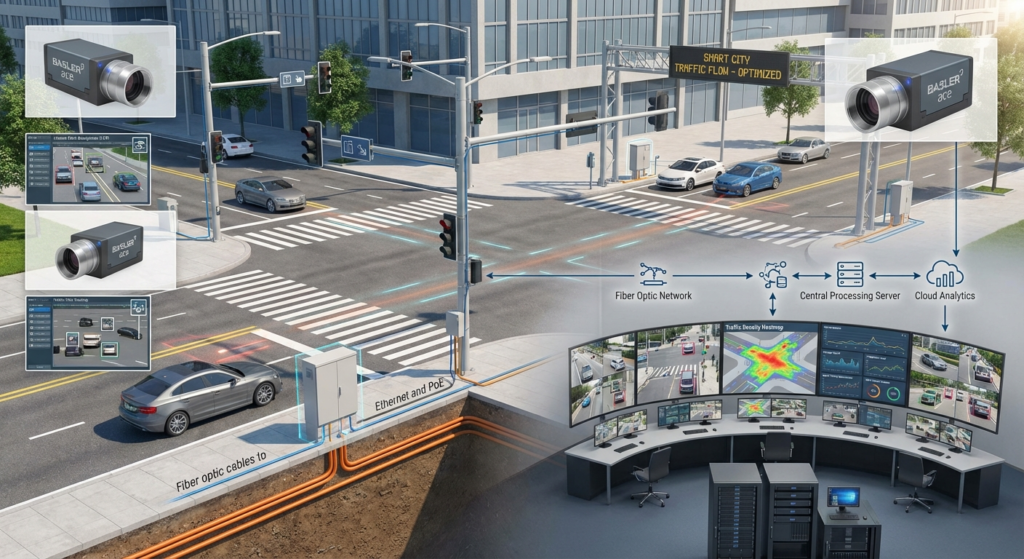
۴.۳. شهرهای هوشمند و نظارت پیشرفته
در محیطهای شهری، نیاز به پردازش ویدئویی ایمن و کممصرف در خود دستگاه (به جای ارسال همه ویدئوها به ابر) رو به افزایش است.
-
تحلیل ترافیک بلادرنگ: شمارش وسایل نقلیه، طبقهبندی آنها و تشخیص تصادفات با استفاده از مدلهای آموزشدیده روی Jetson و دادههای با کیفیت از دوربینهای Basler نصب شده در چهارراهها. کیفیت تصویر Basler تضمین میکند که پلاکهای خودرو در شرایط نوری متغیر قابل خواندن باشند.
-
امنیت عمومی: تشخیص رفتارهای مشکوک یا اشیاء رها شده با کمترین نرخ مثبت کاذب (False Positives).

۴.۴. بهداشت و درمان و تصویربرداری پزشکی تعبیهشده
در تجهیزات پزشکی، دقت و استانداردسازی حیاتی است.
-
دوربینهای آندوسکوپی و میکروسکوپی: ماژولهای کوچک Basler با رابط BCON میتوانند مستقیماً در سر ابزارهای جراحی یا میکروسکوپهای دیجیتال تعبیه شوند. Jetson میتواند پردازشهای پیچیده مانند بهبود کنتراست تصویر (Contrast Enhancement) یا ردیابی خودکار سلولها را در زمان واقعی انجام دهد.
۵. مزایا و چالشها: ارزیابی استراتژیک
استفاده از ترکیب Basler و Jetson یک انتخاب معماری است که مزایای قابل توجهی به همراه دارد، اما بدون چالشهای خاص خود نیست.
۵.۱. مزایای اصلی این ترکیب
۱. عملکرد بیرقیب در لبه (Edge Performance)
تراشههای Jetson، به ویژه سری Orin، دارای توان محاسباتی برای اجرای شبکههای عصبی عمیق پیچیده (مانند YOLOv7 یا Transformer Networks) با نرخ فریم بالا هستند که برای کاربردهای بینایی تعبیهشده ضروری است.
۲. کیفیت تصویر صنعتی و پایداری (Industrial Grade Quality)
برخلاف دوربینهای ارزان قیمت مبتنی بر USB که اغلب از Global Shutter پشتیبانی نمیکنند، دوربینهای Basler به طور خاص برای جلوگیری از اعوجاجهای حرکتی طراحی شدهاند، که در اتوماسیون حیاتی است.
۳. کاهش تأخیر از طریق MIPI-CSI2 و BCON
انتقال دادهها از طریق رابطهای سطح پایین (Low-Level Interfaces) مانند MIPI-CSI2، سربار پروتکل را حذف کرده و تأخیر سرتاسری (End-to-End Latency) را به حداقل میرساند. این امر برای کنترل حلقهبسته (Closed-Loop Control) در رباتیک بسیار مهم است.
۴. اکوسیستم نرمافزاری قوی
ترکیب NVIDIA JetPack (شامل CUDA، TensorRT، VisionWorks) با پلتفرم pylon Basler، یک تجربه توسعهدهنده نسبتاً یکپارچه را فراهم میکند، که باعث تسریع زمان عرضه به بازار (Time-to-Market) میشود.
۵.۲. چالشهای فنی و راهحلها
چالش ۱: تخصصی بودن رابط BCON و هزینه اولیه
رابط BCON، اگرچه کارآمد است، اما به معنای وابسته شدن به محصولات خاص Basler و نیاز به بردهای توسعه (Carrier Boards) سفارشی یا کیتهای توسعه ارائه شده توسط Basler یا شرکای NVIDIA است که ممکن است انعطافپذیری کمتری نسبت به پورتهای استاندارد USB/GigE داشته باشند.
-
راهحل: استفاده از کیتهای توسعه رسمی Basler که شامل مبدلهای BCON به پورتهای استاندارد Jetson (در صورت وجود) یا طراحیهای سفارشی که مستقیماً از پینهای MIPI-CSI2 روی مادربرد Jetson استفاده میکنند.
چالش ۲: مدیریت حافظه و پهنای باند
با افزایش رزولوشن دوربینها (مثلاً ۴K یا بالاتر) و نرخ فریم، مدیریت جریان دادههای خام (Raw Data) در پهنای باند محدود MIPI-CSI2 و حافظه مشترک Jetson چالشبرانگیز میشود.
-
راهحل: اجرای پردازشهای اولیه ضروری (مانند دموژایز کردن رنگ در سنسورهای Bayer یا برش تصویر) در ISP سختافزاری Jetson یا حتی در سختافزار تعبیه شده در ماژول Basler، قبل از ارسال دادهها به هستههای تنسور برای استنتاج اصلی.
چالش ۳: آموزش و پیادهسازی مدلهای تخصصی
برای استخراج حداکثر توان از Jetson، توسعهدهندگان باید مدلهای خود را با TensorRT بهینهسازی کنند. این فرآیند نیاز به درک عمیقتری از معماریهای عصبی و ابزارهای تخصصی دارد.
-
راهحل: استفاده از ابزارهای خودکار Jetson مانند Model Optimizer و پیروی دقیق از راهنماهای NVIDIA برای کوانتیزهسازی مدلها (Quantization) به فرمت INT8 برای دستیابی به بالاترین بازدهی در DLA.
۶. آینده و روندها: تکامل بینایی تعبیهشده
صنعت بینایی تعبیهشده با سرعت سرسامآوری در حال پیشرفت است. این پیشرفتها تأثیر مستقیمی بر نحوه همکاری Basler و NVIDIA در آینده خواهند داشت.
۶.۱. ظهور Jetson Orin و پیشبینیپذیری در زمان واقعی
معرفی خانواده Jetson Orin (با هستههای تنسور قدرتمندتر و NVDLA) به این معنی است که سیستمهای لبه میتوانند مدلهای بزرگتر و پیچیدهتری را با دقت بالاتر اجرا کنند. این امر نیاز به حسگرهایی با دقت بالاتر و عملکرد نویز (Noise Performance) بهتر را افزایش میدهد – حوزهای که Basler در آن تخصص دارد.
روند آینده به سمت تضمین زمان واقعی (Real-time Guarantees) متمایل است. سیستمهای حیاتی مانند رباتهای جراحی یا خودروهای خودران به جای “تقریباً بلادرنگ”، به تأخیرهای کاملاً قابل پیشبینی نیاز دارند. این امر نیازمند ادغام نرمافزاری عمیقتر بین درایورهای Basler و زمانبندی سختافزاری (Hardware Scheduling) Jetson است.

۶.۲. بینایی چندطیفی و فراتر از RGB
آینده بینایی ماشین تنها به تصاویر مرئی محدود نمیشود. نیاز به جمعآوری داده در طول موجهای مختلف (مانند مادون قرمز نزدیک – NIR، مادون قرمز حرارتی) در حال افزایش است، به خصوص برای دید در شب، تشخیص مواد و کاربردهای پزشکی.
Basler در حال افزایش سهم خود در بازار دوربینهای چندطیفی است. ادغام این سنسورها با Jetson به دستگاهها اجازه میدهد تا فاکتورهای محیطی را به طور همزمان مدلسازی کنند (مثلاً تشخیص حضور اشیاء پنهان شده توسط دود یا نور کم)، که نیازمند پهنای باند ورودی عظیمی است که Jetson Orin قادر به مدیریت آن است.
۶.۳. بینایی و حسگرهای ادغام شده (Sensor Fusion Advancement)
روند اصلی، حرکت به سمت ادغام حسگرها در سطح سختافزار است. انتظار میرود که در نسلهای بعدی پلتفرمهای تعبیهشده، مسیرهای سختافزاری اختصاصیتری برای انتقال دادههای تصویر از دوربینهای BCON/MIPI به ماژولهای پردازش سیگنال (مانند پردازشهای پیش از استنتاج) ایجاد شود که تأخیر را تا حد ممکن پایین بیاورد.
همکاریهای نزدیکتر بین Basler (به عنوان تولیدکننده سنسورها و سختافزار رابط) و NVIDIA (به عنوان طراح SoC و نرمافزار) در تعریف استانداردهای آینده برای این ادغامهای سطح پایین نقش محوری خواهد داشت.
۶. نتیجهگیری: ساختن آینده هوشمند در لبه
ترکیب پلتفرم محاسباتی پیشرفته NVIDIA Jetson با کیفیت و قابلیت اطمینان دوربینهای صنعتی Basler، یک فرمول اثبات شده برای توسعه سیستمهای بینایی تعبیهشده با عملکرد بالا در محیطهای سخت است.
از معماری مبتنی بر GPU و Tensor Cores در Jetson گرفته تا رابط بهینه BCON برای انتقال دادههای با تأخیر کم از دوربینهای Basler، این همافزایی به مهندسان اجازه میدهد تا موانع سنتی عملکرد در لبه را از میان بردارند. این سیستمها دیگر صرفاً “بینایی” نیستند؛ آنها سیستمهای “هوشمند” هستند که در لحظه تصمیمگیری میکنند.
برای توسعهدهندگانی که پروژههایی با نیازهای سختگیرانه مانند بازرسی سریع خط تولید، رباتیک با نیاز به زمان پاسخگویی کم، یا دستگاههای تصویربرداری پزشکی پیچیده را در دست دارند، ترکیب Jetson و Basler یک انتخاب استراتژیک و قدرتمند محسوب میشود. با توجه به تکامل مداوم پلتفرمهای Orin، انتظار میرود که این همکاری در سالهای آینده، مرزهای آنچه را که در بینایی تعبیهشده ممکن است، جابهجا کند.
این ترکیب، قدرت پردازش موازی و هوش مصنوعی پلتفرم Jetson را با کیفیت تصویر صنعتی و پایداری دوربینهای Basler ادغام میکند. نتیجه، سیستمی است که میتواند دادههای تصویری را با دقت بالا دریافت کرده و الگوریتمهای سنگین یادگیری عمیق را به صورت بلادرنگ (Real-time) در لبه پردازش کند.
اکثر دوربینهای USB3 Vision و GigE Vision شرکت Basler با پلتفرم Jetson سازگار هستند. با این حال، برای بهترین عملکرد در بینایی تعبیه شده Jetson، استفاده از ماژولهای دوربین dart با رابط BCON یا MIPI-CSI2 توصیه میشود که سربار CPU را کاهش داده و مستقیماً به پردازنده متصل میشوند.
رابط BCON که توسط Basler توسعه یافته، اجازه میدهد تا سیگنالهای تصویر مستقیماً از طریق رابط MIPI-CSI2 به پردازنده Jetson منتقل شوند. این کار باعث حذف لایههای نرمافزاری اضافی شده، تأخیر (Latency) را به حداقل میرساند و پهنای باند بیشتری را برای پردازشهای هوش مصنوعی آزاد میکند.
Basler مجموعه نرمافزاری pylon را ارائه میدهد که کاملاً با معماری ARM و سیستمعامل لینوکس (NVIDIA JetPack) سازگار است. با نصب نسخه ARM نرمافزار pylon، شما به تمام APIها برای کنترل دوربین و دریافت تصویر در محیط بینایی تعبیه شده Jetson دسترسی خواهید داشت.
بله، کاملاً. با استفاده از دوربینهای Basler مجهز به Global Shutter و پردازش سریع Jetson، پدیده تاری ناشی از حرکت (Motion Blur) حذف میشود. این ویژگی برای کاربردهای رباتیک، مانند برداشت و گذاشتن قطعات (Pick and Place) یا ناوبری رباتهای پرنده، حیاتی است.
بله، با استفاده از افزونههای GStreamer که توسط pylon پشتیبانی میشوند، میتوانید تصاویر دوربین Basler را مستقیماً وارد پایپلاین DeepStream کنید. این کار به شما اجازه میدهد تا از شتابدهندههای سختافزاری Jetson برای دیکد و استنتاج مدلهای هوش مصنوعی استفاده کنید.
دوربینهای وبکم معمولاً فشردهسازی تصویر انجام میدهند و کنترل دقیقی روی نوردهی ندارند. در مقابل، دوربینهای Basler دادههای خام (Raw Data) با کیفیت بالا، نرخ فریم ثابت و قابلیت اطمینان صنعتی ارائه میدهند که برای دقت الگوریتمهای هوش مصنوعی ضروری است.
بستگی به نرخ فریم و پیچیدگی مدل هوش مصنوعی دارد. Jetson Nano برای پروژههای بینایی تعبیه شده Jetson سطح پایه مناسب است، اما اگر نیاز به پردازش تصاویر ۵ مگاپیکسل با نرخ فریم بالا (مثلاً ۳۰ فریم بر ثانیه) و مدلهای سنگین دارید، مدلهای Jetson Xavier NX یا Orin پیشنهاد میشوند.
با استفاده از رابطهای مستقیم مانند MIPI-CSI2 (از طریق BCON)، مصرف انرژی مرتبط با انتقال داده کاهش مییابد. همچنین، پلتفرم Jetson امکان تنظیم حالتهای توان (Power Modes) را دارد تا بتوانید تعادلی بین عملکرد و مصرف انرژی بر اساس نیاز پروژه برقرار کنید.
لزوماً خیر. Basler و شرکای NVIDIA کیتهای توسعه و بردهای حامل (Carrier Boards) آمادهای ارائه میدهند که دارای پورتهای مناسب برای اتصال دوربینها هستند. اما برای محصولات نهایی بسیار فشرده، طراحی یک برد اختصاصی برای اتصال ماژولهای BCON میتواند به کوچکسازی سیستم کمک کند.





