چالشها و راهکارهای نورپردازی در Machine Vision با دوربینهای Basler

نورپردازی صنعتی و Machine Vision برای پروژههای بینایی ماشین نورپردازی مناسب انتخاب کنید در بسیاری از پروژههای Machine Vision، مشکل اصلی نه دوربین است و نه الگوریتم؛ بلکه طراحی اشتباه نورپردازی صنعتی است. ما با…
برای پروژههای بینایی ماشین نورپردازی مناسب انتخاب کنید
در بسیاری از پروژههای Machine Vision، مشکل اصلی نه دوربین است و نه الگوریتم؛ بلکه طراحی اشتباه نورپردازی صنعتی است.
ما با تجربه عملی در طراحی سیستمهای بینایی ماشین مبتنی بر Basler، انتخاب صحیح نور، لنز، سنسور، فیلتر، HDR، TDS و Structured Light را متناسب با سناریوی صنعتی شما انجام میدهیم.
اگر در انتخاب نورپردازی صنعتی، دوربین Basler یا طراحی سیستم Machine Vision با چالش روبهرو هستید، سناریوی پروژه خود را با ما مطرح کنید تا بهترین معماری فنی را پیشنهاد دهیم.
۱. مقدمه: چرا نور در بینایی ماشین مهمتر از دوربین است؟
در اکثر پروژههای بینایی ماشین، وقت، انرژی و بودجه روی انتخاب دوربین، لنز و الگوریتم صرف میشود؛ در حالی که عامل تعیینکننده، نور است.
اگر نور درست طراحی نشود:
- بهترین دوربین Basler با سنسورهای IMX سونی هم نمیتواند عیب را ببیند.
- پیچیدهترین الگوریتم Deep Learning هم فقط نویز و Artefact میبیند.
- سیستم، در محیط کنترلشده «ظاهراً» خوب کار میکند اما در خط واقعی، نرخ خطای متغیر و غیرقابل پیشبینی خواهد داشت.
منطق پایهای این است:
(تصویر خام خوب) ≫ (الگوریتم خوب بدون تصویر خوب)
و «تصویر خام خوب» در Machine Vision، به معنی کنتراست کنترلشده است؛ و این کنتراست، مستقیماً تابع طراحی نور است، نه فقط رزولوشن یا بیتعمق سنسور.
Basler دقیقاً روی همین نقطه وارد شده:
دوربین + نور + کنترل زمانبندی → یک موجود واحد، هماهنگ و Deterministic.
۲. فیزیک نور و رفتار سطوح: چرا بعضی اجسام «همکاری» نمیکنند؟
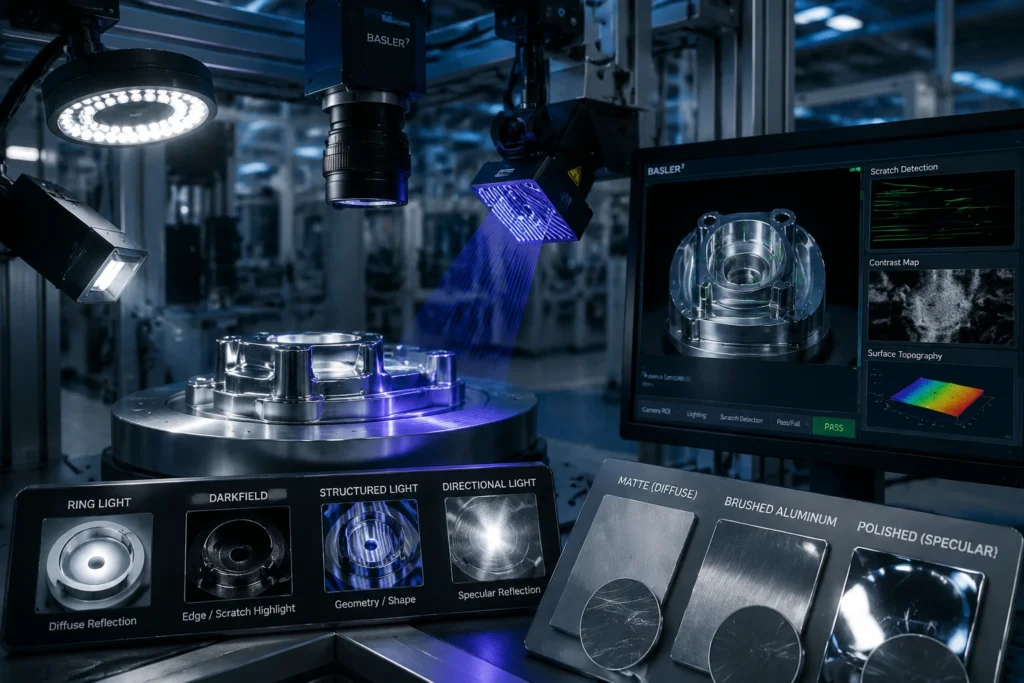
۲.۱ سه رفتار اصلی نور روی سطوح
وقتی نور به سطح میخورد، بهطور ساده سه رفتار داریم:
-
بازتاب پخشی (Diffuse / Lambertian)
- سطوح مات، زبر، رنگشده، آنودایز شده.
- نور را تقریباً در همه جهات پخش میکنند.
- حتی اگر زاویه دوربین و نور کمی جابهجا شود، تغییری فاجعهبار در تصویر رخ نمیدهد.
- اینجا نورهای حلقوی، Ring Lightها و حتی Backlight ساده اغلب جواب میدهند.
-
بازتاب آینهای (Specular)
- سطوح صیقلی: فولاد پولیششده، کروم، شیشه روکشدار، فویل باتری.
- جهت نور برگشتی برابر با زاویه تابش نسبت به نرمال سطح است.
- یعنی انعکاس «جهتمند» است، نه پخشی.
-
رفتار ترکیبی (Specular+Diffuse)
- سطوحی که هم بافت دارند هم براقاند (مثلاً بدنه خودرو، قطعات آلومینیوم پرداخت شده).
- همین ترکیبی بودن، کار نورپردازی را پیچیدهتر میکند.
۲.۲ نقطه کور هندسی و مشکل تشخیص عیوب روی سطوح براق
برای سطوح آینهای، دو مشکل بنیادی داریم:
-
نقطه کور هندسی (Blind Spot)
- نور با زاویه خاص تابیده میشود، بازتاب هم فقط در یک جهت دقیق رخ میدهد.
- اگر دوربین در آن مخروط بازتاب قرار نگیرد، سطح «تقریباً سیاه» دیده میشود.
- نتیجه: یک لکه خیلی روشن (Highlight) در یک نقطه، و بقیه تقریباً تاریک.
- الگوریتم هرگز نمیتواند روی این Chaos سراسری، رفتار پایدار ارائه دهد.
-
وابستگی تشخیص عیب به جهتگیری Scratch
- خراش نرمال موضعی سطح را تغییر میدهد.
- اگر جهتش طوری باشد که نور را به دوربین برگرداند → خطوخش روشن.
- اگر جهتش عکس باشد → خطوخش در پسزمینه تاریک، عملاً نامرئی.
- این یعنی شما ممکن است همان عیب را در یک قطعه ببینید و در قطعه مشابه نه؛ نه به خاطر الگوریتم، بلکه صرفاً به خاطر زاویه.
منطق پشت این داستان واضح است:
تا زمانی که نور را زاویهپذیر و قابل کنترل نکردهاید، نرخ خطای شما روی سطوح براق، ذاتاً ناپایدار است.
۳. معیارهای کمی برای ارزیابی نورپردازی
برای اینکه نورپردازی را علمی و مهندسیوار طراحی کنیم (نه سعی و خطای کارگاهی)، باید معیارهای زیر را بسنجیم:
۳.۱ یکنواختی روشنایی (Illumination Uniformity)
تعریف:
Uniformity=(1−IavgImax−Imin)×100%
- استاندارد صنعتی: ≥ 92٪
- کاربردهای حساس (متروژی، نیمههادی): ≥ 98٪
اگر یکنواختی پایین باشد:
- الگوریتم Thresholding شما در مرکز و گوشهها رفتار متفاوت دارد.
- Histogram تصویر در طول زمان یا مکان رانش میکند.
- دادهها غیرقابل تکرار میشوند، حتی اگر دوربین Basler و لنز عالی باشد.
۳.۲ کنتراست (Contrast)
کنتراست ویژگی/پسزمینه:
- هرچه این مقدار بالاتر باشد، Segmentation سادهتر و مقاومتر است.
- هدف اصلی نورپردازی در Machine Vision: حداکثر کردن کنتراست برای ویژگیهای مورد نظر، حداقلکردن اطلاعات اضافی (Reflections، Shadows).
۳.۳ SNR (Signal-to-Noise Ratio)
- نور مفید: انعکاس از سطح هدف، با طول موج هدف.
- نویز: نور محیطی، نور سرگردان، نویز الکترونیکی سنسور.
- SNR بالا یعنی شما میتوانید Exposure را کاهش دهید (برای کاهش Motion Blur) بدون اینکه تصویر «نخاله» شود.
۴. معماری و راهکارهای Basler برای نورپردازی
Basler جالب عمل کرده: بهجای اینکه بگوید «این دوربین ماست، نور را از هرجا خواستی بگیر»، نور را در معماری سیستم ادغام کرده است.
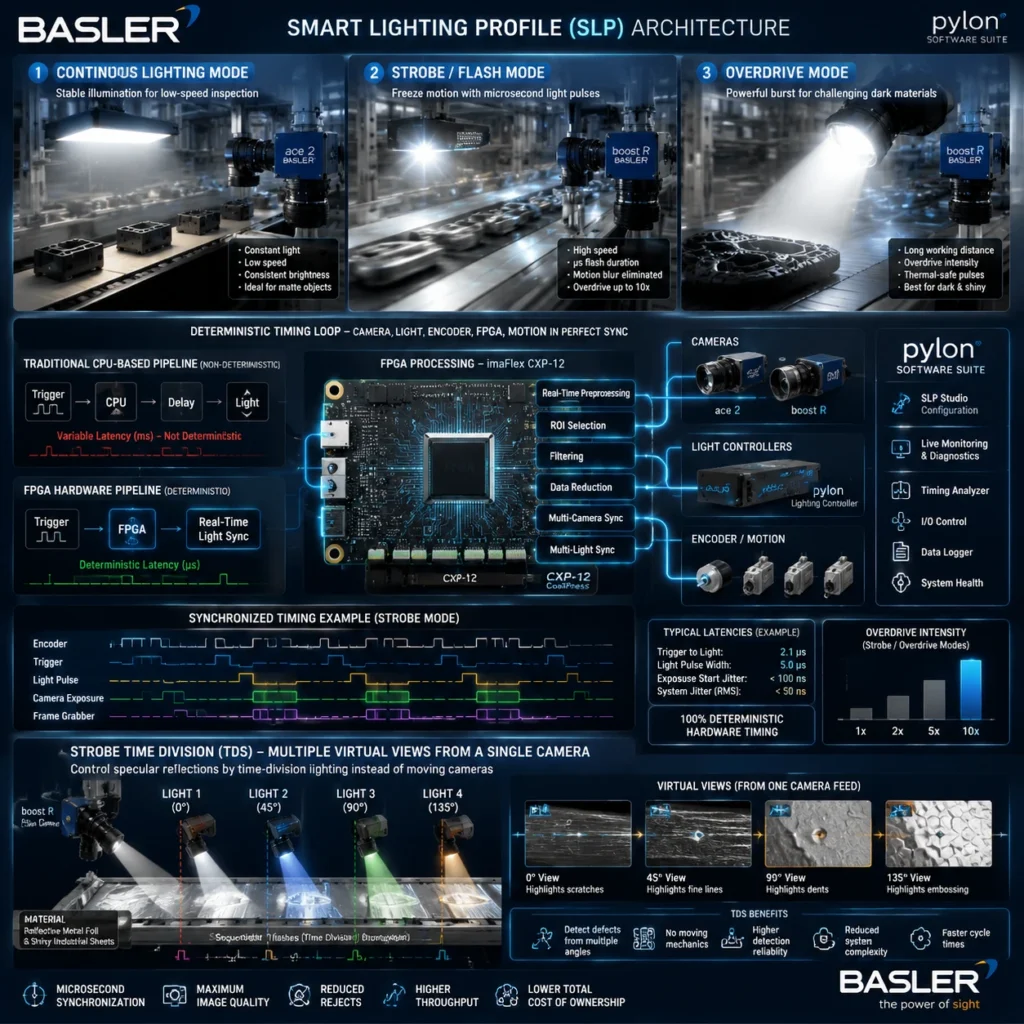
۴.۱ SLP – Smart Lighting Profile: دوربین، کنترلر نور را «هدایت» میکند
SLP یعنی:
- دوربینهای Basler (boost R، ace 2، ace U/L) مستقیماً از طریق pylon به کنترلر نور فرمان میدهند.
- نیازی به PLC یا کنترلر خارجی اختصاصی برای نور نیست.
- سه Mode اصلی:
۴.۱.۱ حالت Continuous (نور ثابت)
- برای بازرسیهای استاتیک، سطوح مات، سرعتهای پایین.
- ویژگی: ثبات و پایداری روشنایی.
- منطقی است وقتی به فریز حرکت نیازی نداریم.
۴.۱.۲ حالت Strobe / Flash
- برای خطوط پرسرعت یا اجسام در حال حرکت.
- قابلیت Overdrive تا ۱۰ برابر شدت اسمی برای پالسهای کوتاه.
- هدف:
- فریز کردن حرکت (کاهش Motion Blur).
- جبران نور محیطی قوی.
- کاهش Exposure Time بدون افت SNR.
۴.۱.۳ حالت Overdrive
- برای شرایط نوری «خصمانه»:
- مواد جاذب نور (پلاستیک سیاه، لاستیک).
- فاصله زیاد منبع نور تا جسم.
- نور محیطی خیلی قوی.
- Overdrive عملاً یک «Burst» انرژی نوری است؛
- مدتزمان محدود (برای جلوگیری از آسیب حرارتی).
- اما شدت بسیار بالا.
اینجا فلسفه Basler این است که:
نور و دوربین نباید دو جزیره مجزا باشند؛ باید در یک Loop زمانی واحد کنترل شوند.
۴.۲ کنترل نور مبتنی بر FPGA: حذف تأخیر نرمافزاری
در معماریهای کلاسیک:
- Trigger → CPU → Logic → Command to light → Light On
- در این مسیر، OS Scheduling، Process Switching، Interruptها… تأخیر و Jitter وارد میکنند.
Basler با استفاده از FPGA روی Frame Grabber:
- Trigger دوربین، پردازش اولیه تصویر، و Command به نور در یک Pipeline سختافزاری Deterministic انجام میشود.
- تأخیر به سطح Microsecond کاهش مییابد.
- Sync بین:
- دوربین
- نور
- سیستم Motion (Encoder)
اثر ساختاری:
- معماری از «Inspect then Decide» → به «Detect & Respond in Real-Time» مهاجرت میکند.
- جالبتر: همین FPGA میتواند:
- Pre-processing را روی برد انجام دهد (Filtering، ROI Selection، Data Reduction).
- چندین دوربین و منبع نور را همزمان سنکرون کند.
۴.۳ Strobe Time Division (TDS): چند نور، یک دوربین، چند «دید مجازی»
چالش:
در بعضی کاربردها (مثلاً بازرسی فویل، ورق فلزی، سطوح براق) نیاز داریم:
- همان نقطه از جسم را با چند زاویه نور مختلف ببینیم تا عیوب مختلف Highlight شوند.
- روش سنتی: چند ایستگاه، چند دوربین، فضای زیاد، هزینه بالا.
Basler چهکار میکند؟
- یک Line Scan یا Area Scan (مثلاً racer 2 با 16K و 200 kHz) + چند منبع نور زاویهدار.
- این منابع نور بهصورت Time-Division و با Sync دقیق روشن میشوند.
- هر Pulse نور یک «تصویر مجازی» با شرایط نوری متفاوت تولید میکند، در حالی که جسم در همان نقطه یا در موقعیت کاملاً قابل محاسبه قرار دارد.
- FPGA روی کارت imaFlex CXP-12 با Visual Applets:
- کنترل دقیق زمان روشن/خاموش شدن هر منبع نور.
- دور زدن CPU برای جلوگیری از Jitter زمانی.
فلسفه TDS:
بهجای جابهجایی فیزیکی دوربین یا نصب چند ایستگاه، زاویه نور را در زمان تقسیم کن و چند View مجازی از یک نقطه بگیر.
این برای سطوح Specular یک Game Changer است؛ چون میتوانی از چند زاویه، Coneهای بازتاب مشکلساز را دور بزنی.
۵. نورپردازی در دوربینهای سهبعدی Basler: Blaze و Stereo ace
۵.۱ Blaze – Time-of-Flight با نور IR 940 nm
Blaze بر پایه سنسور Sony IMX556 DepthSense و ToF کار میکند:
- نور در محدوده ۹۴۰ nm (فروسرخ نزدیک) ساطع میشود.
- سنسور، اختلاف فاز/زمان بازگشت نور را اندازهگیری میکند.
چالش اصلی:
- نور محیطی (نور خورشید، چراغهای Fluorescent، LEDهای صنعتی) که در همین طیف یا نزدیک به آن فعالاند، میتوانند سیگنال ToF را آلوده کنند.
راهکار Basler:
-
Bandpass Optical Filter در ۹۴۰ nm
- فقط نور با طول موج 940 nm را عبور میدهد.
- نور سفید/روز (که طیف پهن دارد) و نورهای IR غیرهدف را حذف میکند.
-
کنترل نور سرگردان (Stray Light)
- توصیه: سطوح براق نزدیک میدان دید را حذف/پوشش دهید تا نور Scatter نشود.
-
کنترل دما و Thermal Drift Correction
- ToF شدیداً به دما حساس است.
- Blaze نیاز به Warm-up حدود ۲۰ دقیقه تا رسیدن به ۲۲°C پایدار دارد.
- Basler در Firmware، Correction برای Drift دمایی دارد.
۵.۲ Stereo ace – Active Stereo
Stereo ace
- سیستم Active Stereo (یعنی طرحهای نور ساختاریافته + Stereo) را برای محیطهای صنعتی به کار میگیرد.
- هدف:
- بازسازی ۳D روی سطوح چالشبرانگیز (Glossy، Textured، Mixed Materials).
- حفظ دقت در حضور نویز، نور محیطی، و سطوح ترکیبی.
در این سیستم، نور و دوربین یکپارچه طراحی شدهاند؛ و Basler تلاش کرده که «کاربر نهایی» را از نیاز به دانش عمیق اپتیک، تا حد ممکن بینیاز کند.

۶. چالشهای کلاسیک نورپردازی و راهکارهای مهندسی
۶.۱ سطوح بسیار براق (Specular Surfaces) و نقاط کور فیزیکی
مطابق فیزیک بازتاب آینهای، ما:
- نقاط کور زیادی داریم که نور در آنها به دوربین نمیرسد.
- نرخ تشخیص عیوب بشدت به زاویه وابسته است.
راهکار ۱: نور گنبدی (Dome Light / Diffuse)
- نور به سقف گنبد تابیده میشود و به صورت پخشی به سطح میرسد.
- بازتابهای آینهای مستقیم کاهش مییابند.
- برای سطوح ترکیبی (براق + مات) عالی است.
- نقطه ضعف:
- بافت ریز (Fine Texture) به خوبی برجسته نمیشود.
- حجم فیزیکی نسبتاً زیاد.
راهکار ۲: نور کمزاویه (Low-Angle / Darkfield)
- نور تقریباً مماس با سطح، با زاویه بسیار تند.
- سطح کاملاً صاف، نور را از مسیر دوربین دور میکند → پسزمینه سیاه.
- هر Scratch، Dent یا Ridge، نور را به سمت دوربین Scatter میکند → عیب روشن.
- نتیجه: کنتراست ایدهآل (عیب روشن روی پسزمینه سیاه).
- نیاز:
- پسزمینه جاذب نور (سیاه، ضدانعکاس).
- کنترل دقیق بازتابهای ناخواسته (از تجهیزات، اپراتور).
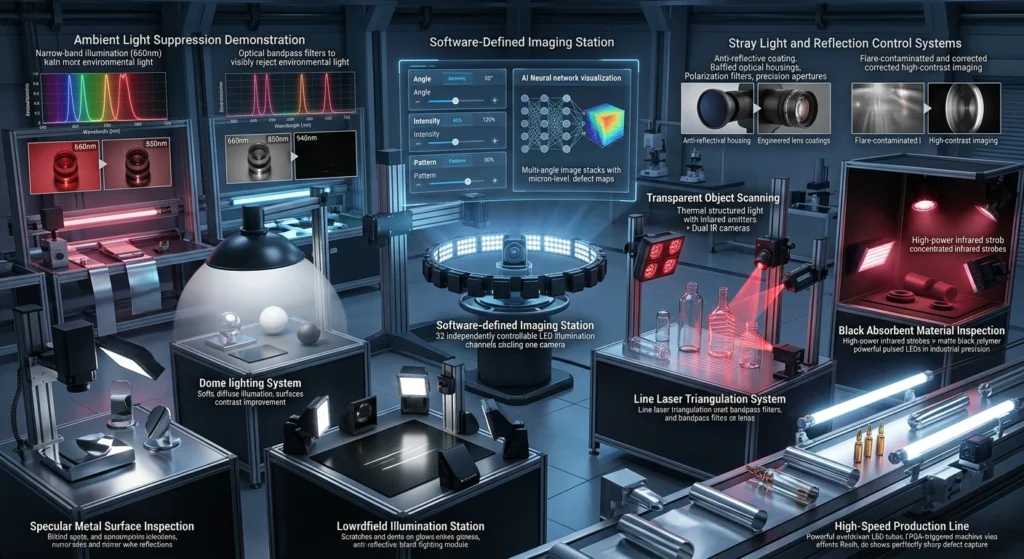
راهکار ۳: نورپردازی تعریفشده نرمافزاری (Software-Defined Imaging)
فلسفه جدید:
- به جای یک یا دو کانال نور، تا ۳۲ کانال زاویهای مستقل.
- کاربر میتواند با نرمافزار، بدون تغییر سختافزار، زاویه/شدت/Pattern هر کانال را تنظیم کند.
- شبکههای عصبی روی تصاویر چندزاویه آموزش میبینند:
- ترکیب اطلاعات ۲.۵ بعدی (بهنوعی Depth Approximation).
- تشخیص عیوبی که در ۲D کلاسیک نامرئیاند (مثلاً Particles، Scratches برآمده).
- دقت تکرارپذیری تا حدود ۳ μm گزارش شده.
در این رویکرد، نور دیگر یک «پارامتر ثابت» نیست؛ بلکه یک فضای Configurable است که با AI همزمان Adjust میشود.
۶.۲ اجسام شفاف: شیشه و پلاستیک – دشمن مثلثبندی کلاسیک
برای اجسام شفاف:
- نور چندبار در داخل/خارج جسم انعکاس/انکسار مییابد.
- Multi-Path Interference به وجود میآید.
- روشهای Structured Light Triangulation کلاسیک (فرض یک بازتاب) کارآیی خود را از دست میدهند.
راهکار ۱: نور حرارتی ساختاریافته – Fraunhofer IOF (goROBOT3D)
- به جای نور مرئی، از الگوهای حرارتی (Thermal Pattern) استفاده میشود.
- دو دوربین IR، الگوی گرمای ساطعشده را میخوانند.
- مزیت:
- عبور و شکست نور مرئی دیگر مسئله نیست.
- شیشه، پلاستیک سیاه، فلزات براق قابل اسکناند.
- بهبود جدید:
- کاهش زمان اندازهگیری از ۱۵ s → < ۱.۵ s با DOE و Single-Shot.
راهکار ۲: Line Laser Triangulation با فیلتر باندگذر
- لیزر با طول موج مشخص (مثلاً ۸۵۰ nm) خطی روی سطح میاندازد.
- دوربین از زاویه دیگر، اعوجاج خط را ثبت میکند.
- با فیلتر Bandpass مناسب، نویز ناشی از سایر منابع نوری کاهش مییابد.
- کاربرد:
- کانتور ظروف شیشهای.
- اندازهگیری ارتفاع مایعات از طریق تغییر شکل خط لیزر.
راهکار ۳: Hybrid Structured Light (DepthSight، MotionCam-3D)
- ترکیب Fringe + Line Patterns.
- سنسورهای محاسباتی (Computational Image Sensors)
- Parallel Structured Light برای کاهش Motion Artefacts.
- هدف: اسکن شیشه/پلاستیک بدون نیاز به اسپری ماتکننده (که در صنعت اغلب غیرقابل قبول است).
۶.۳ مواد سیاه جاذب نور
پلاستیک سیاه، لاستیک، برخی سرامیکها:
- نور مرئی را عمدتاً جذب میکنند.
- سیگنال بازتابی بسیار کم → کنتراست پایین.
راهکارها:
-
استفاده از طول موجهای IR (850 / 940 / 1050 nm)
- در بسیاری از پلیمرها، رفتار جذب در IR متفاوت است.
- ممکن است بازتاب نسبی بهتر یا Transmission قابل استفاده داشته باشیم.
-
استفاده از Strobe با Overdrive شدید
- افزایش شدید Flux نوری در پالس کوتاه.
- SNR را بالا میبرد بدون اینکه دمای LED بیش از حد افزایش یابد.
۶.۴ نور محیطی (Ambient Light) – «Chaos Gremlin» سیستم
مشکل:
- خورشید، چراغهای سقف، باز شدن دربها، حضور اپراتور…
- همه اینها نور متغیر با طیف پهن وارد سیستم میکنند.
- Gray-Levelها رانش میکنند؛ Thresholdها ناکارآمد میشوند.
فلسفه دفاع:
نور و فیلتر باید به عنوان یک «Matched Pair» طراحی شوند.
- یک طول موج باریک انتخاب میکنیم (مثلاً 660 nm یا 850 nm).
- فیلتر Bandpass در جلوی لنز قرار میدهیم.
- نتیجه:
- نور محیطی بهشدت سرکوب میشود.
- تنها نور منبع اختصاصی ما دیده میشود.
در Blaze:
- فیلتر ۹۴۰ nm این کار را بهطور Built-in انجام میدهد.
طراح باید اثر فیلتر روی فاصله کانونی را هم لحاظ کند (ضخامت شیشه → تغییر FoV).
۶.۵ نور سرگردان (Stray Light) و بازتابهای چندگانه
Stray Light:
- از دیوارههای داخلی، سطوح براق نزدیک، پشت لنز و… میآید.
- نتیجه:
- کاهش کنتراست.
- Artefact در Depth Maps (بهخصوص در ToF و Active Stereo).
- از دست رفتن نقاط در Point Cloud.
اقدامات Basler (خصوصاً در Blaze):
- لنز با Coating ضدبازتاب.
- محدود کردن Aperture منبع نور.
- پوششهای ضدبازتاب داخلی.
- توصیه به کاربران: حذف یا پوشش سطوح براق نزدیک.
از منظر تحقیق:
- استفاده از DOE و Polarization Filtering برای حذف مؤلفههای Polarized خاص.
- کاهش White Flare تا ۵۰٪ گزارش شده.
۶.۶ Motion Blur در خطوط پرسرعت
سرعتهای بالا:
- فویل تا ۵۰۰ m/min
- صنایع داروسازی تا ۶۰۰ واحد/min
اگر Exposure یا نوردهی Sync نباشد:
- Motion Blur، کاهش وضوح، از دست رفتن عیوب کوچک.
راهکار:
-
LEDهای High Intensity با Overdrive
- Chromasens Corona II Tube Light: تا ۲.۵ میلیون لوکس.
- Metaphase UB-LL: حدود ۲.۵ میلیون لوکس.
-
معماری Basler (FPGA + SLP)
- Trigger → نور → Shutter در یک Loop سختافزاری هماهنگ.
- کاهش Latency و Jitter نرمافزاری.
- امکان فریز کردن حرکت حتی روی سطوح بازتابنده منحنی (مثل لولهها و آمپولها).
۷. تکنیکهای تخصصی نورپردازی
۷.۱ نور ساختاریافته (Structured Light Illumination)
- Projection الگوهای Stripes (سینوسی، دودویی، رمزگذاری شده).
- دوربین از زاویه دیگر، Distortion الگو را میخواند.
چالشها:
- نویز و روشنایی ناهموار، مخصوصاً در خطوط لیزری.
- راهحلهای جدید:
- Feature Fusion
- الگوریتمهای Entropy-based
- میانگین خطای ~۰.۱۳ mm، حداکثر < ۱.۰۷ px (در نویز ۰.۳).
- سرعت پایین روشهای Multi-Frequency Sinusoidal
- معمولاً < ۵ Hz برای ۵ MP.
راهحل نو:
- Binary Coded Patterns با DMD
- نرخ تا ۲۸۸۰ Hz برای الگوهای دودویی (در مقابل ۳۶۰ Hz برای سینوسی).
- اسکن ۳۰ Hz با Repeatability ~۰.۱ μm، بدون نیاز به Gamma Correction.
- بازتابهای چندگانه در سطوح Microfacets
- منجر به خطای مثلثبندی.
تکنیکهای نوظهور:
- Structured Polarization
- Motion Contrast Cameras
- Deep Learning برای شمارش نوارهای چندخطی بدون Pattern Codes اضافی.
۷.۲ نور پسزمینه (Backlighting)
- منبع نور پشت قطعه، دوربین روبهرو.
- نتیجه: Silhouette با کنتراست بسیار بالا.
- کاربرد:
- اندازهگیری دقیق ابعاد.
- تشخیص لبه، سوراخها، شیارها.
- سیستمهای مدرن:
- Ultra-Thin Backlights
- Uniformity بالا Edge-to-Edge
- امکان اضافهکردن Polarizer برای پلاستیکهای نیمه شفاف.
۷.۳ Brightfield vs Darkfield
-
Brightfield: نور نزدیک به محور نوری دوربین (زاویه کم).
- مناسب سطوح صاف؛ اما روی سطوح براق Glare شدید میدهد.
-
Darkfield: نور با زاویه بسیار تند.
- پسزمینه تاریک، عیوب روشن.
محصولات ترکیبی:
- Chromasens Combined Tube Light
- Brightfield + Darkfield در یک ماژول.
- یک Pass، دو اطلاعات:
- Texture و رنگ (Diffuse)
- عیوب سطحی/لبهها (Darkfield)
- شدتهای تا ۸۰۰ kLux برای Darkfield و ۱ MLux برای بخش Brightfield.
۷.۴ پولاریزیشن (Polarization) برای حذف Glare
منطق:
- روی منبع نور: Polarizer خطی.
- روی لنز: Polarizer خطی با زاویه ۹۰درجه نسبت به اولی.
- نور Specular Reflection، بدون تغییر Polarization برمیگردد → توسط Polarizer دوم حذف میشود.
- نور Scatter شده از زیرسطح یا عیوب، Polarization را تخریب میکند → بخشی عبور میکند.
نتیجه:
- کاهش White Flare
- افزایش Visibility عیوب زیرسطحی یا زیر پوشش پلاستیک.
جدید: Wire-Grid Polarizers تا حوزه SWIR (Short-Wave IR) بهخوبی کار میکنند؛ این برای ترکیب IR + Polarization بسیار مهم است.
۷.۵ نور UV و IR
-
UV (365 / 385 nm)
- بسیاری از چسبها، روغنها، مواد امنیتی فلورسنت میشوند.
- نور UV → نور مرئی (سبز/آبی/قرمز) از ماده ساطع میشود.
- نیاز: فیلتر Long-Pass روی دوربین برای حذف UV و عبور فلورسنس (برای امنیت چشم و کیفیت تصویر).
-
IR (850 / 940 nm)
- برای دید در شب، نفوذ در دود و غبار، مواد تیره.
- Basler dart + HDR در سیستم SEA.AI برای تشخیص موانع دریایی در نور کم و Glare شدید.

۸. نقش هوش مصنوعی و Digital Twin در نورپردازی پویا
۸.۱ نورپردازی تطبیقی (Adaptive Illumination) و OmniLight
روند جدید:
- نور دیگر «Set-and-Forget» نیست.
- سیستم با AI، شرایط صحنه را میسنجد و تصمیم میگیرد:
- کدام زاویه نور؟
- کدام طول موج؟
- چه شدتی؟
OmniLight
- تمرکز روی ترمیم تصاویر تحت نور مخرب با روشهای نرمافزاری (Post-processing).
- بدون تغییر سختافزار، سعی میکند نقص نور ایدهآل را جبران کند.
- اما همچنان نیازمند پردازش اضافه و Delay بعد از Acquisition است.
۸.۲ Digital Twin نور و دوربین در Basler
Basler در GTC 2025:
- شبیهساز دوربین+نور برای کارخانههای آینده معرفی کرده.
- کاربر میتواند:
- قبل از خرید سختافزار، زاویه دوربین، نوع نور، ارتفاع نصب، شدتها را تست کند.
- چالشهای نوری را در محیط ۱۰۰٪ دیجیتال حل کند.
در مسیر تحقیقاتی:
- Neuromorphic Exposure Control
- الهام از چشم انسان.
- نواحی خیلی روشن/تاریک را جداگانه و Dynamic کنترل میکند.
- پتانسیل سرعت بالاتر و انعطافپذیری بیشتر نسبت به Exposure دیجیتال سنتی.

۹. روندهای آینده : به کدام سمت میرویم؟
۹.۱ LEDهای Ultra-Bright
- Metaphase UB-LL: تا ۲.۵ میلیون لوکس.
- Chromasens Corona II Tube Light:
- ۱.۲ MLux استاندارد،
- تا ۲.۵ MLux در حالت متمرکز (Focused).
- هدف:
- غلبه بر حرکتهای سریع.
- کاهش اثر نور محیطی.
- امکان Exposureهای بسیار کوتاه.
۹.۲ Single-Shot 3D و Spectral Filtering پیشرفته
- حرکت از Multi-shot به Single-shot 3D.
- روشهای حرارتی Fraunhofer، حسگرهای Hyperspectral.
- LEDهای Hyperspectral با Stability طیفی بالا.
- چالش مدیریت حرارتی و Stability Spectral Address شده است.
۹.۳ Plug-and-Play و استانداردسازی نور–دوربین
- SLP Basler نمونهای از این جهتگیری است:
- دوربین = Controller نور.
- نور = بخشی از اکوسیستم pylon.
- انتظار:
- ماژولهای ۳در۱ (Linear + Darkfield + Brightfield).
- «Software as Light» – یعنی نور از طریق API، Profile-محور و هوشمند کنترل میشود.

۱۰. جمعبندی: نور، یک متغیر پویا در بینایی ماشین Basler
اگر بخواهیم جمعبندی را در چند محور خلاصه کنیم:
-
نورپردازی، عنصر حیاتی و اغلب دستکمگرفتهشده در بینایی ماشین است.
- دوربین Basler، لنز خوب و الگوریتم قوی، بدون طراحی نور مناسب، خروجی پایدار و Repeatable تولید نمیکنند.
-
چالش اصلی امروز: سطوح «ناهمکار»
- سطوح Specular (براق آینهای)، Transparent (شفاف)، و Black (جاذب نور).
- هرکدام نیاز به استراتژی نوری اختصاصی دارند:
- Dome، Darkfield، Multi-Angle برای Specular
- حرارتی، Hybrid Structured Light برای Transparent
- IR + Overdrive برای مواد سیاه.
-
Basler، نور را در معماری سیستم ادغام کرده است:
- SLP برای کنترل هوشمند نور از دل دوربین و pylon.
- FPGA برای Loop کنترل Deterministic نور–دوربین–Motion.
- TDS برای چند زاویه نور با یک دوربین (کاهش هزینه و فضای فیزیکی).
- Blaze و Stereo ace برای 3D با کنترل دقیق نور IR و Stray Light.
-
هوش مصنوعی و Digital Twin، نور را از یک پارامتر ثابت به یک متغیر برنامهپذیر تبدیل کردهاند.
- AI-Powered Adaptive Lighting، OmniLight، Neuromorphic Exposure.
- شبیهسازی دیجیتال قبل از پیادهسازی واقعی.
-
آینده:
- LEDهای فوقپرقدرت،
- Single-Shot 3D،
- Hyperspectral + Polarization،
- و Plug-and-Play کامل نور–دوربین؛
به سمت عصر جدیدی از اتوماسیون صنعتی میروند که در آن «نور» خودش یک موجود هوشمند در حلقه کنترل است.
برای پروژههای بینایی ماشین نورپردازی مناسب انتخاب کنید
در بسیاری از پروژههای Machine Vision، مشکل اصلی نه دوربین است و نه الگوریتم؛ بلکه طراحی اشتباه نورپردازی صنعتی است.
ما با تجربه عملی در طراحی سیستمهای بینایی ماشین مبتنی بر Basler، انتخاب صحیح نور، لنز، سنسور، فیلتر، HDR، TDS و Structured Light را متناسب با سناریوی صنعتی شما انجام میدهیم.
اگر در انتخاب نورپردازی صنعتی، دوربین Basler یا طراحی سیستم Machine Vision با چالش روبهرو هستید، سناریوی پروژه خود را با ما مطرح کنید تا بهترین معماری فنی را پیشنهاد دهیم.
نورپردازی صنعتی یکی از مهمترین اجزای هر سیستم Machine Vision است، زیرا کیفیت تصویر و قابلیت تشخیص الگوریتمهای پردازش تصویر به شدت به نحوه توزیع نور، شدت نور و زاویه تابش وابسته است.
در بسیاری از کاربردهای بینایی ماشین، اگر نورپردازی صنعتی به درستی طراحی نشود، حتی بهترین دوربینها نیز قادر به تولید تصویر مناسب برای پردازش نخواهند بود. نور مناسب باعث افزایش کنتراست و کاهش نویز تصویری میشود.
از مهمترین چالشهای نورپردازی صنعتی میتوان به سطوح براق، اجسام شفاف، سطوح بسیار تیره، بازتاب نور و تغییرات محیطی در خطوط تولید اشاره کرد.
انواع رایج نورپردازی صنعتی شامل Bright Field، Dark Field، Backlight، Structured Light و Dome Lighting هستند که هرکدام برای نوع خاصی از بازرسی صنعتی استفاده میشوند.
انتخاب نورپردازی صنعتی به عوامل مختلفی مانند جنس سطح قطعه، سرعت خط تولید، نوع عیب مورد نظر، فاصله دوربین و نوع سنسور بستگی دارد.
نورپردازی صنعتی مناسب باعث افزایش نسبت سیگنال به نویز (SNR) و بهبود کنتراست تصویر میشود که در نتیجه تشخیص لبهها، الگوها و عیوب توسط الگوریتمها دقیقتر انجام میشود.
برای کاهش بازتاب در سطوح براق معمولاً از تکنیکهایی مانند Darkfield Lighting، نورپردازی زاویهدار، فیلترهای پلاریزه و Dome Lighting استفاده میشود.
HDR Imaging در نورپردازی صنعتی کمک میکند تا جزئیات در بخشهای بسیار روشن و بسیار تاریک تصویر به طور همزمان قابل مشاهده باشند.
بله، فناوریهایی مانند Smart Lighting Profile (SLP) و کنترل نور مبتنی بر FPGA در برخی دوربینها امکان تنظیم خودکار و دقیق نورپردازی صنعتی را فراهم میکنند.
آینده نورپردازی صنعتی به سمت سیستمهای هوشمند مبتنی بر AI، نورپردازی تطبیقی (Adaptive Lighting) و همگامسازی کامل نور با دوربین و پردازش تصویر حرکت میکند.





