اندازهگیری دقیق با بینایی ماشین: از پیکسل تا میکرون

بینایی ماشین—استفاده از دوربینها و الگوریتمها برای بازتولید و ارتقای ادراک بصری انسان—به یک مولفه ضروری در اندازهگیریهای دقیق در دامنه گستردهای از صنایع تبدیل شده است. از اطمینان از تلرانسهای در حد میکرون در…
بینایی ماشین—استفاده از دوربینها و الگوریتمها برای بازتولید و ارتقای ادراک بصری انسان—به یک مولفه ضروری در اندازهگیریهای دقیق در دامنه گستردهای از صنایع تبدیل شده است. از اطمینان از تلرانسهای در حد میکرون در تولید نیمههادیها تا هدایت بازوهای رباتیک در خطوط مونتاژ، سیستمهای بینایی ماشین میتوانند راهحلهای اندازهگیری غیرتماسی، تکرارشونده و بسیار سریعتری ارائه دهند که از روشهای سنتی گیجمحور در سرعت، انعطافپذیری و یکپارچهسازی پیشی میگیرند. در این مقاله بلاگ، به اصول، اجزا، تکنیکها و کاربردهای واقعیای که زیربنای اندازهگیری دقیق با بینایی ماشین هستند، خواهیم پرداخت. همچنین چالشها و روندهای آینده را که وعده افزایش دقت، وضوح و مقاومت را میدهند، بررسی میکنیم.
اصول اندازهگیری دقیق با بینایی ماشین
در پایه، یک سیستم اندازهگیری بینایی ماشین از سه بلوک ساختمانی تشکیل شده است:
-
گردآوری تصویر: دوربینها (تکرنگ یا رنگی)، لنزها، منابع روشنایی و گاهی فیلترها دادههای خام تصویری را ثبت میکنند.
-
پردازش و تحلیل تصویر: الگوریتمها ویژگیها را استخراج کرده، هندسه را تعیین میکنند و اندازهها را محاسبه میکنند.
-
یکپارچهسازی و کنترل سیستم: اجزا سختافزاری و نرمافزاری برای راهاندازی ثبت تصاویر، پردازش نتایج و ارتباط با سیستمهای خارجی (PLCها، رباتها، پایگاههای داده) هماهنگ میشوند.
معیارهای کلیدی
-
وضوح (Resolution): کوچکترین جزئیات شی را که سیستم میتواند تشخیص دهد، وابسته به اندازه پیکسل و سیستم اپتیکی.
-
دقت (Accuracy): چقدر مقدار اندازهگیریشده به ارزش واقعی نزدیک است، تحت تأثیر کالیبراسیون و انحراف الگوریتمی.
-
بازپذیری (Precision یا Repeatability): پایداری اندازهگیریهای مکرر تحت شرایط یکسان.
-
توان عملیاتی (Throughput): فریم بر ثانیه یا قطعات بر ساعت که سیستم میتواند پردازش کند، وابسته به زمان اکسپوژر، سرعت پردازش و کنترل روشنایی.
متعادلسازی وضوح، دقت و توان عملیاتی نیازمند طراحی دقیق است: حسگرهای با وضوح بالاتر و اپتیکهای دقیق پتانسیل اندازهگیری را افزایش میدهند اما به قدرت پردازشی بیشتر و کنترل روشنایی دقیقتر نیاز دارند.
سامانههای تصویربرداری و اپتیک
انتخاب دوربین
-
نوع حسگر: حسگرهای CMOS به دلیل سرعت و یکپارچگی در صنعت غالب هستند؛ CCDها در شرایط نور کم نویز کمتری ارائه میدهند.
-
گام پیکسل (Pixel Pitch): گام پیکسل کوچکتر وضوح بالقوه بیشتری دارد اما حساسیت نوری را کاهش میدهد.
-
دامنه دینامیکی: در هنگام اندازهگیری اجسام با بازتابندگیهای متغیر اهمیت دارد؛ دامنه دینامیکی وسیعتر از اشباع و سایهافتادگی جلوگیری میکند.
لنزها و میدان دید
فاصله کانونی لنز و اندازه حسگر میدان دید (FOV) و وضوح مکانی را تعیین میکنند. لنزهای تلهسن-تریک (Telecentric)—که پرتوهای اصلی آنها موازی است—برای اندازهگیری دقیق با بینایی ماشین ضروریاند زیرا اعوجاج پرسپکتیو را در عمق میدان حذف کرده و تضمین میکنند اندازه شیء صرفنظر از موقعیت در محور Z ثابت بماند.
-
لنز تلهسنتریک در مقابل لنز استاندارد:
-
تلهسنتریک: بزرگنمایی ثابت، اعوجاج لنزی بسیار کم، اما بزرگتر و گرانتر.
-
استاندارد: جمعوجور و اقتصادی اما نیازمند تراز دقیق برای کاهش پارالاکس و اعوجاج.
-
ملاحظات روشنایی
روشنایی یکنواخت و پایدار پایه اطمینان از اندازهگیری قابل اعتماد است. تکنیکهای رایج شامل:
-
روشنایی پسزمینه: سیلوئتهای با کنتراست بالا ایجاد میکند، ایدهآل برای اندازهگیری ابعاد خارجی.
-
روشنایی میدان روشن (Bright-Field): ویژگیها و بافت سطح را برجسته میکند.
-
روشنایی میدان تاریک (Dark-Field): با نوردهی از زاویه کم لبهها را پررنگ جلوه میدهد.
-
روشنایی ساختاریافته (نوارها، شبکهها): الگوهای شناختهشده را برای استخراج شکل سهبعدی یا آشکارسازی نقصهای سطحی نمایش میدهد.
انتخاب زاویه، شدت و طیف نور (مثلاً مادونقرمز برای مواد مقاوم در برابر حرارت) معمولاً به آزمون و خطای تکراری و گاهی ساخت راهنماها یا پخشکنندههای نوری سفارشی نیاز دارد.
کالیبراسیون: از پیکسل تا واحدهای دنیای واقعی
اندازههای خام پیکسلی بدون کالیبراسیون بیمعنا هستند. کالیبراسیون مختصات تصویری را به فواصل دنیای واقعی نگاشت میکند و اعوجاج لنز را تصحیح میکند.
کالیبراسیون دوبعدی
با استفاده از یک هدف کالیبراسیون—مانند شبکهای از نقاط با فواصل دقیق یا صفحه شطرنجی—سیستم پارامترهای زیر را محاسبه میکند:
-
پارامترهای درونی (Intrinsic): فاصله کانونی، مرکز نوری، ضریبهای اعوجاج لنزی.
-
پارامترهای بیرونی (Extrinsic): جهتگیری و موقعیت دوربین نسبت به سیستم مختصات دنیای واقعی.
تابع calibrateCamera() در OpenCV یک پیادهسازی رایج است که نقشههای اعوجاج و ماتریسهای تبدیل را ارائه میدهد تا مختصات پیکسلی اعوجاجیافته (u,v)(u,v) را به مختصات تصحیحشده و نرمالیزهشده (x,y)(x,y) تبدیل کند.
کالیبراسیون سهبعدی و بینایی استریو
سیستمهای بینایی استریو—دو یا چند دوربین که صحنه یکسانی را مشاهده میکنند—نیاز به کالیبراسیون استریو دارند تا موقعیتهای نسبی دوربینها تعیین شود. با تصاویر رکتشده (Rectified)، الگوریتمها میتوانند نقشههای اختلاف منظر (Disparity) بسازند که عمق ZZ را با استفاده از فاصله پایه BB و فاصله کانونی ff محاسبه میکنند:
که در آن dd اختلاف منظر است. کالیبراسیون دقیق استریو مستلزم ثبت مداوم الگوهای کالیبراسیون با همان فوکوس و روشنایی است که در اندازهگیری استفاده میشود.
تکنیکهای دقت زیرپیکسلی
دستیابی به دقت زیرپیکسلی—اندازهگیری ویژگیها تا کسری از یک پیکسل—برای کاربردهای با دقت بالا حیاتی است.
مرکز جویی و برازش گاوسی
برای اندازهگیری مرکز یک ویژگی دایرهای (مثلاً نشانه فیـــــدوشیال)، برازش یک تابع گاوسی دوبعدی به پروفیل شدت میتواند مختصات مرکزی را با دقت زیرپیکسلی ارائه دهد. الگوریتم شکل شدت را مدل میکند:

حل برای (x0,y0)(x_0, y_0) برآورد دقیقتر مرکز را میدهد.
مکانیابی لبه
آشکارسازی لبه با دقت زیرپیکسلی اغلب از روشهای زیر استفاده میکند:
-
درونیابی مبتنی بر گرادیان: تعیین پروفیل گرادیان لبه و درونیابی نقطه عبور صفر بین مراکز پیکسلی.
-
اپراتورهای Canny/Roberts همراه با برازش منحنی روی پروفیل گرادیان.
اندازهگیری اختلاف منظر فاز (Phase Measuring Deflectometry)
برای سطوح بازتابنده قوی، نمایش الگوهای سینوسی با جابهجایی فاز و تحلیل تغییر فاز در الگوهای بازتابی، تغییرات ارتفاع سطح را با دقت نانومتری اندازه میگیرد.
نور ساختاریافته و اسکن سهبعدی
نور ساختاریافته، الگوهای شناختهشده (خطوط، شبکهها، توالیهای شبهتصادفی) را به جسم میتاباند. با تحلیل اعوجاج این الگوها، میتوان هندسه سطح سهبعدی را بازسازی کرد.
-
تکخطی: یک نوار را میتاباند و آن را روی جسم جابهجا میکند—سریع اما وضوح محدود.
-
الگوهای Gray Code: الگوهای دودویی متوالی، همخوانی مقاوم ایجاد میکنند.
-
روشهای فازشیفت: چندین الگوی سینوسی فازشیفتشده دقت عمقی بسیار بالایی ارائه میدهند.
وضوح عمق ΔZ\Delta Z تابعی از هندسه پروژکتور-دوربین، تراکم الگو و ویژگیهای نویز است. سیستمهایی که از چندفرکانس فازشیفت استفاده میکنند، میتوانند ابهامات پیچشی را خنثی کرده و وضوح میکرومتری عمق را در میادین دید وسیع محقق کنند.

دوربینهای زمان پرواز (ToF)
دوربینهای زمان پرواز مدت زمانی را که نور مدولهشده تا رسیدن به جسم و بازگشت صرف میکند، اندازه میگیرند. آنها نقشههای عمق را در نرخ ویدیو فراهم میکنند و امکان اندازهگیری حجم سریع اجزای در حال حرکت را میدهند.
-
اندازهگیری دامنه و فاز: تأخیر فازی سیگنال بازتابی به فاصله نگاشت میشود.
-
مزایا: اکتساب عمق در زمان واقعی، مقاوم در برابر تغییرات نور محیط.
-
چالشها: بازتابهای چندمسیره میتوانند خطاهای عمق ایجاد کنند و وضوح عمق معمولاً در حد سانتیمتر است—محدودکننده اندازهگیری جزئیات بسیار ریز.
با ترکیب دادههای ToF با تصاویر با وضوح بالا (RGB یا تکرنگ)، میتوان عمق خام را با دادههای بافت یا لبه دقیق ترکیب کرد.
جریانهای الگوریتمی برای اندازهگیری
یک خط لوله معمول اندازهگیری بینایی ماشین شامل مراحل زیر است:
-
پیشپردازش: کاهش نویز (فیلتر مدیانی)، کسر پسزمینه و افزایش کنتراست.
-
کشف ویژگی: آنالیز بلاب برای حفرههای دایرهای، آشکارسازهای خطوط برای لبهها، آشکارسازهای گوشه برای نشانهها.
-
برازش هندسی: برازش دایره یا بیضی با کمترین مربعات، تبدیلهای Hough برای خطوط، تطبیق شکل.
-
محاسبه ابعاد: محاسبه فواصل، زاویهها، قطرها یا سایر معیارها از هندسههای برازششده.
-
اعتبارسنجی آماری: حذف دادههای پرت، محاسبه عدم قطعیت اندازهگیری.
سیستمهای مدرن اغلب شتاب GPU یا پردازش همزمان FPGA را برای حفظ توان عملیاتی بالا، بهویژه هنگام اجرای عملیات شکلشناسی یا استخراج ویژگی مبتنی بر موجک بهکار میگیرند.
تحلیل خطا و کمیسازی عدم قطعیت
درک و کمیسازی منابع خطا برای صدور گواهی سیستمهای اندازهگیری ضروری است:
-
خطاهای سیستماتیک: انحراف کالیبراسیون، باقیمانده اعوجاج لنزی، ناپیوستگی روشنایی.
-
خطاهای تصادفی: نویز حسگر، رانش حرارتی، نوسان الکترونیکی.
-
عوامل محیطی: ارتعاش، تغییرات دما، نوسانات نور محیط.
بودجه عدم قطعیت با ترکیب این عوامل—اغلب با استفاده از روششناسی راهنمای ISO برای بیان عدم قطعیت در اندازهگیری (GUM)—فاصله اطمینان برای اندازهگیریها را تعیین میکند. شبیهسازی مونت کارلو میتواند تعاملات پیچیده را مدل کرده و توزیعهای آماری خطای مورد انتظار را ارائه دهد.
یکپارچهسازی با اتوماسیون و صنعت ۴.۰
سیستمهای اندازهگیری بینایی ماشین به ندرت بهطور مجزا کار میکنند. یکپارچهسازی با شبکههای صنعتی (Ethernet/IP، PROFINET، OPC UA) و سیستمهای نظارتی اجازه میدهد:
-
بازخورد در زمان واقعی: تحریک عملگرها یا رباتها برای اصلاح همترازی در حین کار.
-
ثبت داده: پایگاههای داده مرکزی نتایج اندازهگیری را برای کنترل آماری فرآیند (SPC) جمعآوری میکنند.
-
محاسبات لبه (Edge Computing): پردازشگرهای بینایی تعبیهشده تحلیلهای اولیه را انجام داده و نتایج فشرده را برای تحلیل بلندمدت به ابر ارسال میکنند.
پیشرفتهای 5G و شبکهسازی حساس به زمان (TSN) تأخیر را بیشتر کاهش میدهند و امکان شبکههای بینایی توزیعشده را فراهم میکنند که چندین دوربین را در سراسر تأسیسات بزرگ هماهنگ میکنند.
مطالعههای موردی
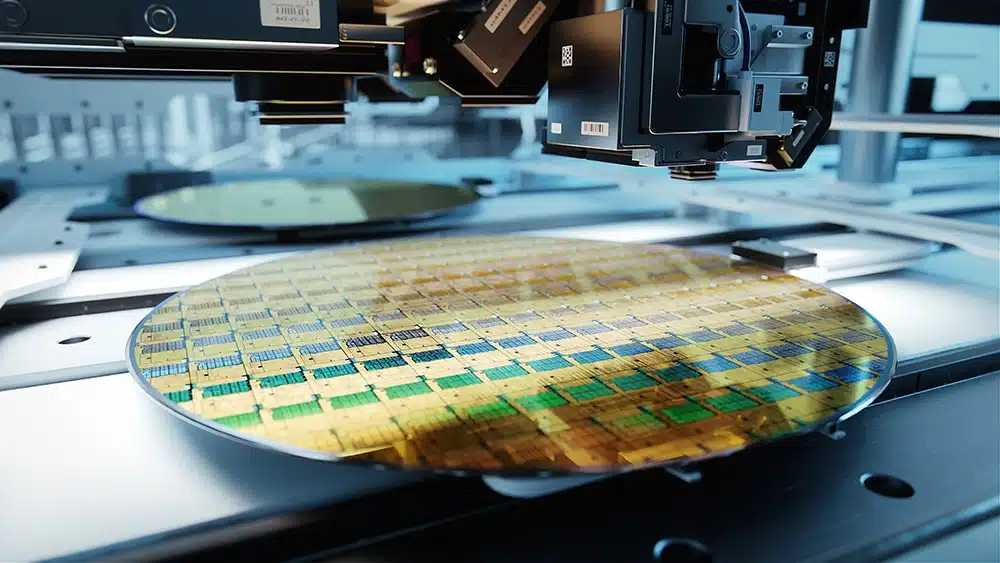
بازرسی ویفر نیمههادی
در لیتوگرافی پیشرفته، دقت همترازی باید در حد چند نانومتر نگه داشته شود. سیستمهای بینایی ماشین از اپتیکهای با بزرگنمایی بالا، لنزهای تلهسن-تریک دقیق و تداخلسنجی فازشیفتی برای اندازهگیری همترازی لایهها و ابعاد ویژگیها در مقیاس ویفر استفاده میکنند. کنترل حلقه بسته با دستگاههای لیتوگرافی (وافر استپر) انحراف را در زمان واقعی تصحیح میکند.
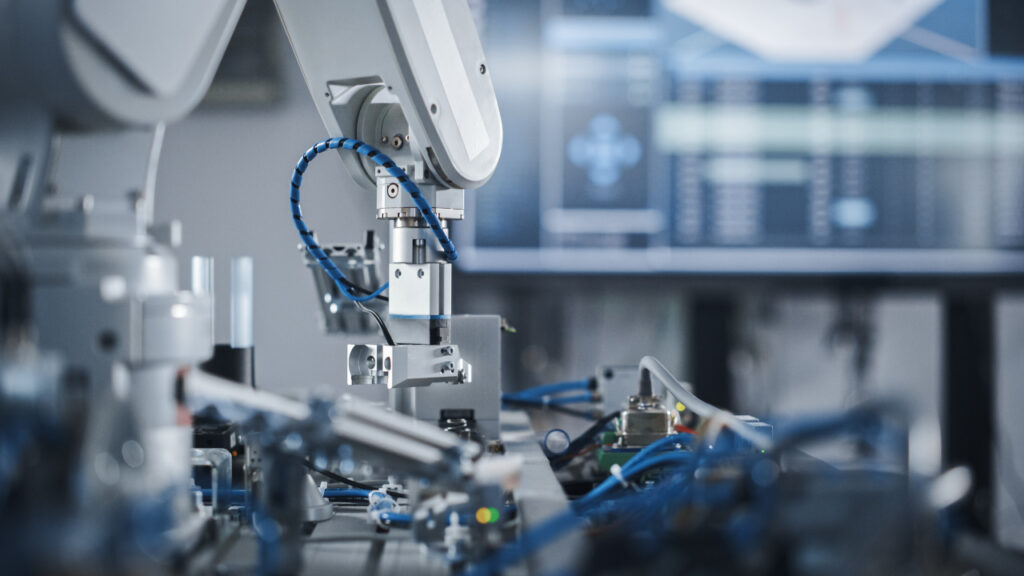
اندازهگیری فاصله و همسطحی اجزای بدنه خودرو
رباتهای خودکار مجهز به اسکنرهای سهبعدی ساختاریافته، فاصله و همسطحی بین پنلهای مجاور بدنه خودرو را اندازهگیری میکنند. سیستمها دقت زیرمیلیمتر را در زمانهای چرخه کمتر از یک ثانیه فراهم میکنند و بازخورد فوری به ابزارهای تنظیمکننده میدهند تا تراز پنلها را تضمین کنند.
متروژی دستگاههای پزشکی
برای دستگاههای قابل کاشت—مانند استنتها با ابعاد ریز میکرومتری—بینایی ماشین میتواند هندسه مقاطع عرضی را از طریق میکروسکوپهای با وضوح بالا همراه با آشکارسازی لبه و برازش زیرپیکسلی اندازهگیری کند و از تطابق با استانداردهای زیستسازگاری و عملکرد اطمینان حاصل نماید.
چالشها و راهبردهای کاهش آنها
-
سطوح بازتابنده و شفاف: نور ساختاریافته و ToF با اجسام صیقلی یا شفاف مشکل دارند. فیلترهای پلاریزه و تصویربرداری چندطیفی میتوانند به جداسازی اطلاعات سطح و پسزمینه کمک کنند.
-
جهتگیریهای متغیر قطعات: فیکسچرها و موقعیتدهندههای رباتیک تضمین میکنند قطعات همیشه در یک جهت مشخص قرار گیرند؛ یا ثبت و همترازی ابرنقاط سهبعدی اسکنها از پوزیشنهای دلخواه انجام شود.
-
مقایسه توان عملیاتی با وضوح: آرایههای چنددوربینه و پردازش چندهستهای میتوانند بار کاری را توزیع کنند اما پیچیدگی سیستم را افزایش میدهند. اولویتبندی ابعاد حیاتی برای ثبت با وضوح بالا و اندازهگیری ابعاد غیرحیاتی با وضوح پایینتر میتواند عملکرد را بهینه کند.
-
مقاومت محیطی: محفظههای کنترل دما، پایههای ضدارتعاش و پوششهای مقاوم، زمان کارکرد سیستم را در محیطهای کارخانهای افزایش میدهند.
روندهای نوظهور
-
یادگیری عمیق برای کشف ویژگی و جدایش: شبکههای عصبی پیچشی (CNN) میتوانند در صحنههای پیچیده از فیلترهای دستساز پیشی بگیرند و یاد بگیرند ویژگیها را تحت شرایط نوری و پسزمینه متغیر مکانیابی کنند.
-
شبکههای متروژی انتها-به-انتها: یکپارچهسازی بینایی، رباتیک و تحلیل ابری برای تطبیق خودکار راهبردهای اندازهگیری بر اساس بازخورد SPC در زمان واقعی.
-
تصویربرداری کوانتومی پیشرفته: پژوهش در همبستگیهای کوانتومی نور وعده فراتر رفتن از محدودیتهای وضوح کلاسیک را میدهد و احتمالاً وضوحی زیر حد پراش فراهم میکند.
-
اندازهگیری طیفسنجی هیپراسپکترال و چندطیفی: فراتر از هندسه، اندازهگیری امضای طیفی میتواند خواص ماده (ضخامت، ترکیب) را همراه با اندازهگیریهای ابعادی استنباط کند.
نتیجهگیری
اندازهگیری دقیق با بینایی ماشین به یک ابزار ضروری برای صنایعی که دقت، سرعت و انعطافپذیری بالا میطلبند، تبدیل شده است. با انتخاب دقیق سختافزار تصویربرداری، طراحی روشنایی مناسب، اجرای کالیبراسیون دقیق، بهرهگیری از الگوریتمهای زیرپیکسلی و یکپارچهسازی با چارچوبهای اتوماسیون، مهندسان میتوانند عملکرد اندازهگیریای به دست آورند که با روشهای تماسی سنتی رقابت کرده و اغلب از آن پیشی میگیرد. همگام با پیشرفت یادگیری عمیق، حسگرهای نورپایه پیشرفته و فناوریهای تصویربرداری کوانتومی، آینده، وضوح، مقاومت و هوشمندی بیشتری را در متروژی بینایی ماشین نوید میدهد و مرزهای ادراک و کمیسازی ماشینها و انسانها را بیشتر محو میسازد.





